□计划控制类型
计划控制分为两种:一种是开环计划控制,一种是闭环计划控制。
开环计划控制也叫硬性控制。施控系统将可控输入转化为计划指令后作用于受控系统,受控系统的输出结果不再被返送回输入端并形成再控制的直链控制方式,称之为开环计划控制。如图所示。
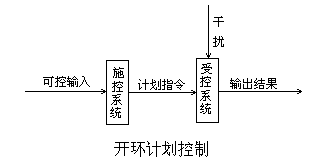
开环计划控制系统,在施控和受控两个子系统之间没有反馈环节,构不成闭合回路。受控系统自身行动的结果,不能够直接影响自身的输入,因而它是一种不完善的控制系统(非自控系统)。在这样的控制系统中,受控系统不仅要接受施控系统的计划指令,同时受到外界干扰的作用。在没有干扰时,受控系统按计划指令行动。当干扰出现后,受控系统的输出,是计划指令和外界干扰共同作用的结果。由于没有反馈环节,计划指令不能自行作相应调整,受控系统就不能完全按计划指令行动,通常会偏离计划轨线,并且不会自动回到计划状态上来。
鉴于上述情况,在开环计划控制中,计划建立的前提是:假设外部环境与受控系统的未来行为具有完全的确定性。因此,它只适用于干扰因素影响较小,或系统本身抗干扰能力强,或有较多的历史经验可资借鉴的控制活动。像按管理法规、工作制度进行的硬管理,以及军队系统的条例、条令的贯彻执行等,均属此列。
闭环计划控制又称反馈计划控制,它与开环计划控制的区别,在于增加了反馈环节(在管理组织中可能是“监测机构”),通过反馈环节,把受控系统的状态或执行结果,返送给施控系统,以影响其计划指令的改变。这样, 整个控制过程形成了一个双向环形的闭合回路,使受控系统根据自身的行动结果,影响自身的输入,从而调整未来的行为。如图所示。
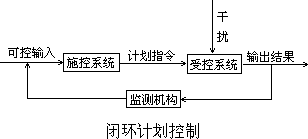
在闭环计划控制中,计划建立的前提是:假设外部环境与受控系统的未来行为大部分是确定的,一部分是未知的因素,会使系统偏离计划轨线。因此,采用反馈,把系统当前的状态与计划状态相比较,如果发现偏差,就改变输入使系统自行回到计划轨线上来。如飞机按预定的航线飞行,在飞行中通过各种控测方位的仪器,把飞机所处的位置通知指挥员。指挥员根据飞机的位置相对于航线的偏差,发出纠正指令,使飞机按预定航线飞行。
在管理中,计划控制是以计划指标为依据,检查监督各项工作的落实情况,发现与计划不符合时,即采取措施进行调整,使工作按计划进行。可见, 计划控制是保证受控系统不偏离计划轨线。这种控制方式的有效性,取决于计划的可行性,即前提假设与实际吻合的程度。吻合程度越高,有效性就越高。但是,再好的计划,也难以完全预料执行中可能发生的一切情况。当形势的变化需要修订目标、改变计划时,常常会出现系统运行的滞后性,表现出对情况变化的不适应。因此,计划控制一般适用于干扰作用较稳定的系统。
