表 10-8 种草养兔生产数据
|
年 度 |
1979 |
1980 |
1981 |
1982 |
1983 |
|---|---|---|---|---|---|
|
序 号 (i) |
1 |
2 |
3 |
4 | 5 |
|
x(0) (i)(元) 售兔收入 1 |
4834 |
7625 |
10500 |
11316 |
17818 |
|
x(0) (i)( 只) 种兔只数 2 |
83 |
131 |
180 |
195 |
306 |
|
x(0) (i)( 亩) 种草面积 3 |
146 |
212 |
233 |
259 |
404 |
|
x(0) (i)( 元) 种兔投资 4 |
251 |
396 |
545 |
590 |
926 |
|
x(0) (i)( 元) 种草投资 5 |
1218 |
1762 |
1941 |
2151 |
3360 |
在图 10-5 中,x1:售兔收入;x2:繁殖用种兔;x3:种草面积;x4:种兔投资;x5:种草投资;u:初投资。
为此,我们需建立整个系统的模型,以便分析各环节间的动态关系以及系统的优化调控决策。
1. 种兔与其投资环节以数据{x (0) (i)}与{x(0) (i)}建立GM(1,2)模型, 构造
数据矩阵为:
1 2
( 0)
2
1
(0)
4
2 (0 )
− 2 ∑x2
(i) + ∑x 2
(i), ∑x 4 (i)
i=1
i=1
i= 1
1 3
2 3
− 148.5 647
− ∑x(0) (i) + ∑x (0) (i), ∑x (0) (i)
2 i=1 2
2
i=1
i= 1 4
− 304, 1192
X(2,
4) =
=
− 1 4
( 0)
3
(0)
(0 )
− 491.5,1782
2 ∑x2
(i) + ∑x 2
(i), ∑x 2
(i)
− 742,
2708
i=1
i=1
i= 1
1 5
4 5
− ∑x(0) (i) + ∑x (0) (i), ∑x (0) (i)
2
2
i=1
2
i=1
i= 1
Y = [x (0) (2),x(0) (3),x (0) (4),x(0) (5)]T = [131,180,195,306]
5 2 2 2 2
按最小的乘法解系统辨识系数 a,b 为:
a = [ X(2,4)]−1 ·X(2,4) T ·Y
= 2.0078
b
5 0.6632
得该环节的微分方程为:
dx(1)
2 + 2.0078x(1)
= 0.6632x(1)
(13)
dt 2 4
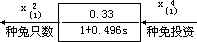
记s为Laplace算子,则从投资x(1) 到种兔x(1) 的动态环节框图及传递函数
4 2
为:
2.种草及其投资环节 建立种草面积数据列{x(0) (i)}与其投资数据{x(0) (i)}
3 s
的 GM(1,2)模型,系统辨识系数为:
a = 1.9917
b 0.2395
该环节的微分方程为:
dx(1)
3 + 1.9917x(1) = 0.2395x(1)
(14)
dt 3 5
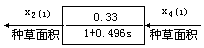 该动态环节框图及传递函数为:
该动态环节框图及传递函数为:
- 养兔收入与种兔、种草环节 根据数据列{x (0)
(i)},{x(0) (i)}及{x(0) (i)}
建立 GM(1,3)型,构造数据矩阵为:
1 2 3
1 2
( 0)
0
( 0)
2 ( 0)
2
(0)
− 2 ∑x1
(i) + ∑x1
(i), ∑x2
(i),
∑x 3 (i)
i=1
i=1
i=1
i=1
1 3
2 3 3
− ∑x(0) (i) + ∑x(0) (i) , ∑x(0) (i), ∑x(0) (i)
X(1,
3) =
2 i=1 1
1 4
1
i=1
3
2
i=1
4
3
i=1
4
− ∑x(0) (i) + ∑x(0) (i), ∑x(0) (i), ∑x(0) (i)
2 i=1 1
1
i=1
i=1 2
3
i=1
1 5
4 5 5
− ∑x(0) (i) + ∑x(0) (i), ∑x(0) (i), ∑x(0) (i)
2 i=1 1
1
i=1
i=1 2
i=1
− 8646.5 214 358
− 17709 394 591
=
− 28617 589 850
− 43134 895 1254
Y = [x(0) (2),x(0) (3),x(0) (4),x(0) (5)]T = [7625,10500,11316,17818]T
5 1 1 1 1
系统识别参数为:
a
2.0399
b = [ X(1,3) T ·X(1, 3)]−1·X(1, 3) T ·Y =
1 5 119.3953
b − 0.749
2
得其微分方程为:
dx(1)
1 + 2.0399x (1)
= 119.3953x(1) − 0.749x(1)
(15)
dt 1 2 3
相应的动态框图及传递函数为:
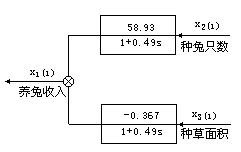
综合上述结果,可得到系统框图及各个环节的传递函数为(图 10-6)。
在图10 - 6中, ⊗ 为加入系统中的一个灰色反馈参数。以x (1)为输出,
u(1)为输入,系统的传递函数为:
x(1) (s)
Φ(s) = 1 =
u(1) (s)
19.27(1 + 0.502s)
0.1225s3 + 0.74s2 + (1.49 − 9.674 ⊗
3 )s + 1 − 19.27 ⊗3
(16)
(二)系统的动态特征分析及优化调控模型
1.系统的动态特征分析 传递函数Φ(s)的分母为系统的特征多项式,通过对它的分析,可以了解该系统的主要动态特征,考虑到经济生态系统中 3 阶变量的实际意义不大,故令 0.1225s3=0,则系统的特征方程为:
0.74s2 + (1.49 - 9.674 ⊗ )s + 1 - 19.27 ⊗ = 0 (17)
系统的特征根为:
s1,2 =
2×0.74
①若(1.49 - 9.674 ⊗ )2 >4×0.74(1- 19.27 ⊗ ),则方程有两个不相等的实根,系统动态一方面受正指数作用,另一方面受负指数的作用,因而其发展是有限度的,会饱和的,即达到一定限额后,就会稳定在这一水平上,不再发展。
②若(1.49 - 9.674 ⊗ ) 2 <4×0.74(1- 19.27 ⊗ ),则方程有两个复数根, 系
统将出现摆动,效益时高时低。
③ 令1.49 - 9.674 ⊗3
= 0,则⊗3
= 1.49
9.674
= 0.154 ,当⊗3
>0.154时, 系统
的效益将不断增长,永无止境。不难看出,这时⊗3 是有下界而无上界的灰
色参数调节这个参数,将使系统保持良好发展。
④ 系统增长的快慢与系数 a 有关:
a = − (1.49 − 9.674 ⊗ 3 ) = 9.674 ⊗ 3 −1.49
2×0.74 1.48
因为 a 是特征根的实数部分,若系统的动态有正指数成分,a 必是其中的一部分,且 a 越大增长越快。
⑤ 特征方程式的根,若全为负实根,且 a 是其中绝对值最小者,则系统的整个动态过程,也就是由初态发展到稳定态的限额过程,其时间长短可用
τ = 3~4 1 进行估计。
a
- 系统的优化调控模型 灰色去余控制理论告诉我们,要实现系统的优化调控,只有将影响系统理想品质的多余项去掉,才能达到目的。为此,需要在原系统的结构模型中加入一个与多余项的传递函数相等,符号相反的去余项,以抵消多余项的作用。在原系统的结构模型中,容易看出,这个多余项就是在前面加入系统中的灰色参数⊗3 。
通过前面的分析,我们知道,系统的传递函数为:
X(1)
1 =
19.27(1 + 0.502s)
(18)
U(1)
0.74s2 + (1.49 − 9.674 ⊗ )s + 1 − 19.27 ⊗
3 3
因为种草养兔业生产属于生物生产过程,系统的变化较慢,系统 2 阶变
量也可以暂不考虑,即令 0.74s2=0,则系统微分方程可以写成:
dx (1)
(1.49 − 9.674 ⊗3
) 1 + (1- 19.27 ⊗
dt
(1)
3 1
= 19.27μ (1)
+ 9.67μ (0)
(19)
时间响应函数为:
x(1) ( t) = (x(0) (1) − c u (1) − c u(0) 1− 19.27 ⊗ 3 t + c u(1) + c u(0)
(20)
1 1 1
2 e1.49 −9.874 ⊗ 1 2
考虑 e 的正指数因数,以保持系统的稳定增长,则:
1
19.27 ⊗3 >1
⊗ 3 > 19.27 = 0.052
9.674 ⊗ <1
⊗ < 1
= 0.103
3 3 9.674
即,将⊗ 3 调节在0.052≤ ⊗ 3 ≤0.103的范围内。就可保持系统能够满足我们希望的品质。这一决策表明,经过优化,去余项⊗3 由大于0.154, 且只有下界而无上界的灰色参数,可进一步控制在 0.052—0.103 的灰色区间内,从而为决策者提供了便于择优控制的范围。事实上,从养兔收入中提取5.2%至 10.3%的资金用于系统再生产的投资,在实际生产中是完全可以做到的,而且也清楚地反映出养兔是一种投资小收益大的生产事业,在经济条件尚有困难的地区也是容易推广的富民事业。
