研究动能定理 96
动能定理叙述的是力对空间的积累效应和受力物体动能之间的关系。作用力可以是恒力,也可以是变力。为了测量方便,再加上中学数学知识的局限,本实验三种方法中的作用力均为恒力。因为应用牛顿第二定律和运动学公式可以直接推导出动能定理,所以在实验中应尽量避免使用数学推导,否则就失去了用实验研究动能定理的意义。方法一、二、三都是固定作用力 F,改变 F 作用的距离 s,得到一系列(v2,△Ek)
值,然后用图线法得出结论:v2 与 W 成正比,比例系数约为 m/2。方法四先固定 F,改变 s,得到 s 和△Ek 成正比;再固定 s,改变 F,得到 F 和
△Ek 成正比。最后用多变量复合的方法得出 W=F·s 与△Ek 成正比的结论。此方法更具有一般性。
方法一
器材 带定滑轮的木板,打点计时器,小车,动滑轮,弹簧秤,钩码,细绳,刻度尺等。
操作
-
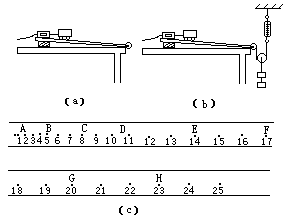
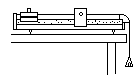
将打点计时器安装在木反的无滑轮端,并将此端适当地垫高,使小车获得一个初速度之后,能拉着纸带在木板上作匀速运动(图 a)。
-
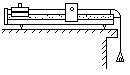
按图(b)安装好实验装置。接通打点计时器的电源后释放小车, 在小车运动的过程中读出弹簧秤的读数 F。
-
取下纸带,从比较清楚的点子处开始,每隔相同的点数(例如 3 点)取一点,分别标上 A、B、C⋯⋯H 等字母(如图 c),作为取样点。
-
因为小车的加速度是恒定的,因此可以将取样点两边两个点之间的平均速度作为取样点处的取时速度。即 VA=s1,3/2T,vB=s4,6/2T , vc=s7,9/2T,⋯⋯VH=s22,24/2T。
-
用刻度尺测量出起始点(速度为零的点)到 A、B、C⋯⋯H 各点之间的距离 s1s2,⋯⋯s8。用天平称出小车的质量 m。
-
计算出小车从起始点到 A、B、C⋯⋯H 各点的过程中,拉力对小车作的功 W1=F·s1,W2=F·s2,⋯⋯W8=F·s8。
-
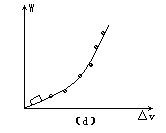
以横轴代表小车通过 A、B、C⋯⋯H 各点时的速度 v 的增量(相
对起始点)△v,以纵轴代表 W,作出 W-△v 图,得到一条曲线(图 d)。
-
将 W-△v 图与基础篇第 50、51 页中各种函数关系的图线对照,初步估计是一条 W=a·△v2 曲线。因此再作 W-△v2 图,得到一条直线。
-
用图解法求出 W-△v2 图线的斜率 k,可知在误差范围内 k=m/2,
说明W = 1 m∆v2,即动能定理。也可以用线性回归法证实W与v2成正比,
2
并求出斜率(具体方法见基础篇第 57 页的有关内容)。
注意
-
在点子密集区可以用 4 个 T 的位移来求速度。
-
为了减少测量力的误差,要选择适当量程的弹簧秤。
说明 此实验可说明将物体的动能定义为 1 mv2的原由。
2
实例 某次实验中测得
∆v = s , /(2T) = 0.0051 m / s = 0.128m / s,
A 1 3
0.0400
∆v = s , /(2T) = 0.0112 m / s = 0.280m / s,
- 4 6
0.0400
∆v = s , /(2T) = 0.0172 m / s = 0.430m / s,
- 7 9
0.0400
∆v = s , /(2T) = 0.0231 m / s = 0.578m / s,
D 10 12
0.0400
∆v = s , /(2T) = 0.0290 m / s = 0.725m / s,
E 13 15
0.0400
∆v = s , /(2T) = 0.0350 m / s = 0.875m / s,
F 16 18
0.0400
∆v = s , /(2T) = 0.0410 m / s = 1.03m / s,
G 19 21
0.0400
∆v = s , /(2T) = 0.0470 m / s = 1.18m / s 。
H 22 24
0.0400
s1=0.0030m, s2=0.0150m, s3=0.360m,
s4=0.0660m, s5=0.1050m, s6=0.1520m, s7=0.2070m, s8=0.269m.
m=0.221kg, F=0.56N, W1=F·s1=0.56×0.0030J=1.7×10-3J, W2=F·s2=0.56×0.015J=8.4×10-3J, W3=F·s3=0.56×0.036J=20×10-3J, W4=F·s4=0.56×0.066J=37×10-3J,
W5=F·s5=0.56×0.105J=59×10-3J, W6=F·s6=0.56×0.152J=85×10-3J, W7=F·s7=0.56×0.207J=116×10-3J, W8=F·s8=0.56×0.269J=150×10-3J。
|
序号 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|---|---|---|---|---|---|---|---|---|
|
△ v2(10-3m2/s2) W(10-3J) |
16.4 1.68 |
78.4 8.4 |
185 20.2 |
334 37.0 |
526 58.8 |
766 85.1 |
1050 116 |
1381 150 |
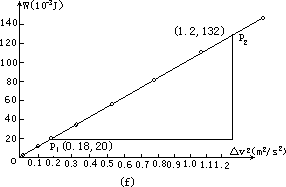
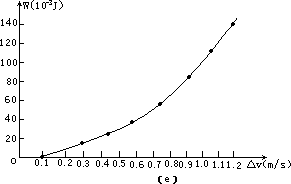
以横轴代表△v,纵轴代表 W,作出 W-△v 图(图 e)。根据图(e) 估计 W 和△v 成 W=a·△v2 关系,因此再作 W-△v2 图(图 f),得一直线。在直线上取两点 p1(0.18,20)和 p2(1.2,132),算出直线的斜率
k = y 2 − y1
x 2 − x1
= (132 − 20)×10−3
1.2 − 0.18
k = 0.110kg 。
说明初速度为零时合外力对小车做的功与小车速度平方成正比,比例系数接近小车质量的一半,即动能定理。
W = 1 m∆v2 。
2
方法二
器材 气垫导轨,数字毫秒计,天平,砝码等。
操作
将气垫导轨调节水平(具体方法见实验 63 方法四)。
-
如图安装好滑块,砝码盘和光电门,在滑块上装上最窄的挡光框。数字毫秒计功能开关置
s2,时间选择开关选最小的一档。
-
确定导轨上某一点作为滑块运动的起点,从导轨的标尺上读出光电门到起点的距离 s。如果砝码盘和其中砝码的总质量为 m,则在滑块从起点滑到光电门的过程中,合外力对滑块做的功 W=mgs。
-
将滑块上的挡光框对准起点后,由静止释放滑块。当滑块经过光电门时,毫秒计记下挡光框挡光的时间
t。如果挡光框两前沿之间的距离是 d,则滑块经过光电门时的即时速度就是 v=d/t。滑块从起点开始到经过光电门的过程中速度的增量△v=v。
-
改变光电门的位置,重复操作(3)、(4),共重复 7 次,得到 7 组
(△v,W)的值。
用方法一操作(7)、(8)、(9)相同的方法处理实验数据,得到动能定理。
注意 因为本实验近似地将砝码盘及其中砝码的的总重力 mg 作为拉滑块的力 F,因此系统的加速度宜小不宜大。
方法三
器材 斜槽轨道,简式计时器,天平砝码,弹簧秤等。
操作
-
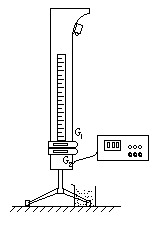
将斜槽轨道直立放置,用小重锤将轨道的平直部分调节成完全竖直。
-
调整电磁铁的位置,使电磁铁吸住钢球时,球下缘恰好与标尺的零刻线对准。调整光电门的可调螺丝,使电磁铁中心与光电门中心线在同一竖直线上。(如图)
-
用弹簧秤测出钢球的重力 F,用天平测出钢球的质量 m。将简式计时器的同步光控开关扳到光控档,使钢球经过光电门 G1 时开始计时, 经过光电门 G2 时停止计时。计时单位选 1/100 档。
-
从标尺上读出两个光电门的位置,取两个位置的中点作为测量点。如果从零刻度线到测量点的距离为 s,则在钢球下落过程中重力对钢球做的功 W=F·s。
-
用电磁铁释放钢球,如果两个光电门之间距离为 d,简式计时器记下的时间为 t,则可认为钢球经过测量点时的即时速度 v=d/t。钢球下落过程中速度的增量△v=v。
-
改变两个光电门的位置,重复操作(4)、(5)共重复 7 次,得到 7 组(△v,W)的值。
-
用与方法一操作(7)、(8)、(9)相同的步骤处理实验数据,得到动能定理。
注意
-
本实验中将钢球在两个光电门之间的平均速度作为钢球在两光电门中点的即时速度是近似的,因此两个光电门之间的距离应适当小一些。
-
因 G1 和 G2 两个光电门放得较近,简式计时器的计时误差可能比较大,因此在光电门的同一个位置上要多次重复测量,求出平均值作为t。
-
本实验不能将槽轨倾斜放置来做,因为钢球在槽轨上滚动时将有
相当一部分能量转化为转动动能。
方法四
器材 氯垫导轨,数字毫秒计,天平,砝码等。
操作
-
按实验 63 方法四中的步骤将气垫导轨调节水平。
-
把最窄的挡光框(两前沿之间距离为 d)装在滑块上,用天平测出滑块的质量
M′。
-
 数字毫秒计的功能开关置 s2 档,时间选择开关用最小档(1ms 或0.1ms)。将两个光电门与数字毫秒计接通,把其中一个装在导轨上,另一个放在桌上不用。砝码盘通过一根细线拉动滑块(如图)。
数字毫秒计的功能开关置 s2 档,时间选择开关用最小档(1ms 或0.1ms)。将两个光电门与数字毫秒计接通,把其中一个装在导轨上,另一个放在桌上不用。砝码盘通过一根细线拉动滑块(如图)。 -
砝码盘和砝码的总质量为
mg,滑块、砝码盘、砝码的总质量为M=M′+m。将滑块紧靠定位杆后释放,从毫秒计上读出挡光框两个前沿挡光的时间差 t,即可算出滑块经过光电门时的速度 v=d/t,系统的总
动能为EK
= 1 Mv2,从标尺读出挡光框从紧靠定位杆一直到经过电门
2
的位移 s。
固定砝码盘与砝码的总质量 m,改变光电门的位置,重复操作(4),可得到若干组(S,EK)值。以横轴代表系统的位移 s,纵轴代表系统动能的增量△EK,作△EK-S 图,可得到一条过原点的直线。(也可以用线性回归法证实△EK 与 s 成正比,具体方法见基础篇第 57 页的有关内容)
用图解法求出图线的斜率,在误差范围内与 mg 相等。
-
固定光电门的位置,改变 m,重复操作(4),可得到若干组(m,EK) 值。以横轴代表作用力 F=mg,纵轴代表系统动能的增量△EK,作△EK-F 图,可得一条过原点的直线(也可以用线性回归法证实△EK 与 F 成正比)。用图解法求出图线的斜率,在误差范围内与系统的位移 s 相同。
-
用多变量复合的方法将操作(5)、(6)的结论合起来。(具体方法
见实验 63 的按语),便可得到动能定理。
