=
- -
- -⋯⋯±△A±△B±△C±⋯⋯。
-⋯⋯±△A±△B±△C±⋯⋯。
 其中间接测得量的最佳值为 =
其中间接测得量的最佳值为 = ---⋯⋯,绝对误差为△x=
---⋯⋯,绝对误差为△x=
±△A±△B±△C±⋯⋯。按前面所讲,在最不利情况下,可能出现的最大误差是△x=△A+△B+△C+⋯⋯。
由此可见,和、差运算结果的绝对误差等于各直接测得量的绝对误差之和。
- 乘法运算中的误差(积的误差) 设 x=A×B,
则 ±△x=(  ±△A)·(
±△A)·(  ±△B)·= · ± ·(±△B)+ ·(±
±△B)·= · ± ·(±△B)+ ·(±
△A)+(±△A)·(±△B)。
其中间接测得量的最佳值为 = · ,绝对误差为△x= ·(±△ B)+·(±△A)+(±△A)·(±△B)。
由于(±△A)·(±△B)为二级小量,可以忽略不计,因此△x=
·(±
△B)+·(±△A)。在最不利的情况下,可能出现的最大误差是△x= ·△ B+·△A。于是,间接测得量的相对误差为
Ex =
△x =
x
A·△B + B·△A =
A·B
△A +
A
△B
B = EA + E B 。
除法运算中的误差(商的误差)
设x = A ,则
B
x±△x = A±△A = (A±△A)·(B±△B)
B±△B ( B±△B) ·( B±△B)
= A· B±B·△A±A·△B±△B·△A (B) 2 − ( △B)2
= A· B±B·△A±A·△B (忽略二级小量)
(B)2
= A + ±B·△A±A·△B 。
B ( B)2
其中间接测得量的最佳值为x = A ,绝对误差为△x =
B
±B·△A±A·△B
(B) 2
。在最不利的情况下,可能出现的最大误差是
△x =
B·△A + A·△B
(B) 2
。于是,间接测量的相对误差为
E = △x = B·△A + A·△B · A = △A + △B = E
-
E 。
x x (B) 2 A A B A B
由此可见,乘、除法运算结果的相对误差等于各直接测得量的相对误差之和。这个结论虽然是从两个因子乘除的运算中推导出来的,但可以推广到任意多个因子乘除的运算中去。
如果在各类运算中有的量是公认的理论值或测量值,那么可以不考虑它们的误差。
从上面推导的误差传递公式中可以看到:当间接测量的计算公式中只含有加减运算时,可直接计算间接测得量的绝对误差△x;当间接测量的计算公式中只含乘除运算时,应先计算间接测得量的相对误差 Ex,然后再用△x=Ex× 计算它的绝对误差比较方便。
 例
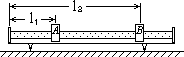
1 图中 A、B 为气垫导轨上的两个光电门。它们的位置分别为l1=25.50±0.05
厘米,l2=78.80±0.05 厘米。求两个光电门之间的距离s。
例
1 图中 A、B 为气垫导轨上的两个光电门。它们的位置分别为l1=25.50±0.05
厘米,l2=78.80±0.05 厘米。求两个光电门之间的距离s。
解 : ±△s=( 2±△l2)-( 1±△l1) 。

 =
2- 1
=
2- 1
=78.80 厘米-25.50 厘米
=53.30 厘米。
计算公式中只有加减运算,所以可以直接计算 s 的绝对误差
△s=△l2±△l1
=0.05 厘米+0.05 厘米
=0.1 厘米因此,最后的结果是
s=53.3±0.1 厘米。
误差一般只保留一位有效数字(至多两位),而且绝对误差的位数应该与最佳值中存疑数字的位数对齐。例 1 中的最佳值原来是 53.30 厘
米。由于它的绝对误差是 0.1 厘米,因此最佳值中小数点后第一位上的
“3”已经不可靠了,所以最后的最佳值只能是 53.3 厘米,而不再是 53.30厘米。
例 2 测定长方体金属块的密度。长方体金属块长 a=4.572±0.004 厘米,宽 b=1.804±0.002 厘米,高 c=1.200±0.002 厘米,质量 m=88.4
±0.1 克。
解:根据密度定义
ρ = m 。
V
ρ±△ρ = m±△m ,
(a±△a) × (b±△b) × (c±△c)
88.4
ρ = 4.752 × 1.804 × 1.200
克 / 厘米3
= 8.932克 / 厘米3。
因为计算公式中只有乘除运算,所以先计算结果的相对误差 Eρ。
E = △m =
m m
0.1
88.4
= 0.0011;
E = △a = 0.004 = 0.0009;
a a 4.572
E = △b = 0.002 = 0.0011;
b b 1.804
E = △c = 0.002 = 0.0017;
c c 1.200
Eρ=Em+Ea+Eb+Ec
=0.0011+0.0009+0.0011+0.0017
=0.005。
 再计算结果的绝对误差
再计算结果的绝对误差
△ρ= ×Eρ
=8.932×0.005 克/厘米 3
=0.05 克/厘米 3。最后的结果是
ρ=8.93±0.05 克/厘米 3。
值得注意,上面推导的四则运算的误差传递公式,是在考虑各因子的误差同时出现最不利的情况时,即都取绝对值相加而得到的。实际上, 出现这种情况的概率是不大的,而且参于运算的直接测得量越多,出现这种情况的概率就越小。因而用上述误差传递公式计算误差,在大多数时候都扩大了间接测量的误差。
误差传递的一般公式
上面用初等数学推导了四则运算中误差的传递公式,这些结论在实验中是很有用的。现在再从广义的角度来讨论误差传递的一般公式及其应用。
设有函数 y=f(x1,x2,⋯⋯,xn)。
式中 y 由 x1,x2,⋯⋯,xn 所决定。令△x1,△x2,⋯⋯,△xn 分别表示 x1,x2,⋯⋯,xn 的绝对误差,△y 表示由△x1,△x2,⋯⋯,△xn 所引起的 y 的误差,则有
y±△y=f( 1±△x1, 2±△x2,⋯⋯, n±△xn) 。
将上式右端按泰勒级数展开,得到
f(
1±△x1, 2±△x2,⋯⋯, n±△xn)=f( 1, 2,⋯⋯, n)
∂y
±△x1 ∂x
∂y
±△x2 ∂x
∂y
± ±△x n ∂x
1
± 2 (△x1
∂2y
) 2 ± ±
∂x 2
∂2y
1
2 ( △xn
∂ 2y
) 2
∂x2
±2△x1·△x 2 ∂x
1·∂x2
≈ f (x
1,x2
, , xn
)±△x
∂y
1 ∂x ±△x
∂y
2 ∂x ± ±△x
∂y
n ∂x 。
上式最后一步由略去了高阶小量而得到,其中 f( 1, 2,⋯⋯, n)是 y 的最佳值,而
∂y
△y = ± ∂x
∂y
·△x1± ∂x
∂y
·△x2 ± ± ∂x
·△xn。
因为 x1,x2,⋯⋯,xn 都是独立的变量,它们的误差可能为正,也可能为负。在最不利的情况下(所有误差项全都同号),可能出现的最大误差是
△y =
∂y
∂x1
·△x1 +
∂y
∂x 2
·△x2 +
∂y
∂xn
·△x n 。
我们规定这个可能出现的最大误差为 y 的误差。y 的相对误差
E = △y =
y y
∂y
∂x1
- △x1 +
y
∂y
∂x2
- △x2 + +
y
∂y
∂xn
- △xn 。
y
以上推导的就是误差传递的一般公式,这个公式虽然是近似的,但在直接测量的量个数不多的情况下,是完全可以用的。
从误差传递的一般公式可以很方便地推导出四则运算的误差传递公式
①和的误差
设 y=x1+x2+⋯⋯+xn,
△y =
∂y
∂x1
·△x1 +
∂y
∂x 2
·△x2 + +
∂y
∂xn
·△xn 。
=△x1+△x2+⋯⋯+△xn。
②差的误差
设 y=x1-x2-⋯⋯-xn,
△y =
∂y
∂x1
·△x1 +
∂y
∂x 2
·△x2 + +
∂y
∂xn
·△xn 。
=△x1+△x2+⋯⋯+△xn。
③积的误差
设 y=x1×x2×⋯⋯×xn,
Ey =
∂y
∂x1
- △x1 +
y
∂y
∂x2
- △x 2 + +
y
∂y
∂xn
- △xn 。
y
= x2 ·x 3
x n ·△x
- x1 x3
xn ·△x + +
x1·x 2 xn x1 x2 x n
x1x2
xn −1 ·△x
x1 x2 x n
= △x1 + △x2 + + △x n
x1 x2 x n
= E x1 + Ex2 + + E xn 。
④商的误差
设y = x1 ,
x2 x3 n
Ey =
∂y
∂x1
x x
- △x1 +
y
1
x
∂y
∂x2
- △x 2 + +
y
x1
x 2x x
∂y
∂xn
- △xn 。
y
= 2 3 n ·△x
x1 1
+ 2 3 n ·△x +
x1 2
x2 x3 xn
x1
x 2 x3 x n
x1
x x2 x x
2 3 4 n ·△x
x1 3
x x x2
+ + 2 3 n ·△x x1 n
x 2 x3 x n x2 x3 xn
= △x1 + △x2 + △x3 + + △x n
x1 x2 x3 x n
= E x1 + Ex2 + Ex3 + + E xn 。
用误差传递的一般公式推导其他初等函数的误差传递公式
① 乘 方 设 y=xn,
Ey =
dy · △x dx y
= n·xn−1· △x
x n
= n· △x
x
= n·Ex 。
例 1 已知 y=x3,x=47.3±0.1, 求:y。
解:Ex
= △x =
x
0.1
47.3
= 0.0021,
Ey=3×Ex=3×0.0021=0.0063,

 =(
)3=47.33=105824,
=(
)3=47.33=105824,
△y= ×Ey=105824×0.0063≈667 。
因为 y 的值可能大至 1.065×105,也可能小至 1.051×105,所以最后的答案应该是
y=(1.06±0.01)×105。
此例的计算结果说明,在乘方运算 y=xn 中,y 的有效位数可以取得和 x 的有效位数相同。如此例中 y 和 x 都是三位有效数字。
②开方
设 y = n x,
dy
Ey = dx
1
△x
-
y
1−1 △x 1
△x 1
= n ·x n
· 1 = n · x x n
= n ·Ex 。
例2 已知 y = x,x = 56.4±0.1,
求:y。
解:Ex
= △x =
x
0.1
56.4
= 0.0018,
E = 1 ×E
= 1 ×0.0018 = 0.0009,
2
y = = = 7.5100,
△y= ×Ey=7.5100×0.0009≈0.0068 。
因为 y 的值可能大至 7.517,也可能小至 7.503,所以最后的答案应该是
y=7.510±0.007。
此例的计算结果说明,在开方运算y = n x中,y的有效位数可以取
得和 x 的有效位数相同。
 ③对数
③对数
自然对数设 y=lnx,
△y =
dy ·△x =
dx
△x
x = E x 。
 由上式可见,一个数的自然对数的绝对误差等于该数的相对误差。常用对数
由上式可见,一个数的自然对数的绝对误差等于该数的相对误差。常用对数
设 y=lgx=0.43429lnx,
△y =
dy 1
dx ·△x = 0.43429 x ·△x = 0.43429Ex 。
由上式可见,一个数的常用对数的绝对误差近似等于该数的相对误差的一半。
例 3 已知 y=lnx,x=175.5±0.1, 求:y。
解:Ex
= △x =
x
0.1
175.5
= 0.0006,
△y=Ex=0.0006,
=ln =ln175.5=5.1676 。
因为 y 的值可能大至 5.1682,也可能小至 5.1670,所以最后的答案应该是
y=5.168±0.001。
此例的计算结果说明,在对数运算 y=lnx 中,y 的有效位数可取得和x 的有效位数相同。同理 y=lgx 的有效位数也和 x 的有效位数相同。
④三角函数正弦函数
设 y=sinx,
dy
△y = dx ·△x = △x· cos x 。
 余弦函数设 y=cosx,
余弦函数设 y=cosx,
dy
△y = dx ·△x = △x· sinx 。
 正切函数设 y=tgx,
正切函数设 y=tgx,
△y =
dy ·△x = △x· sec2 x。dx
例 4 已知 y=sinx,x=0.864±0.001 弧度, 求:y。
解:△y=△x·cosx=0.001×cos0.864=0.0006,
=sin0.864=0.7604。
因为 y 的值可能大至 0.7610,也可能小至 0.7598,所以最后的答案应该是
y=0.760±0.001。
此例的计算结果说明,在正弦函数 y=sinx 中,y 的有效位数可取得和 x 的有效位数相同。余弦函数 y=cosx 也有相同的结论。
例 5 已知 y=tgx,x=0.864±0.001 弧度, 求:y。
解:△y=△x·sec2x=0.001×sec20.864=0.003, =tg0.864=1.171。
因为 y 的值可能大至 1.174,也可能小至 1.168,所以最后的答案应该是
y=1.17±0.01。
此例的计算结果表明,在正切函数 y=tgx 中,y 的有效位数可取得和x 的有效位数相同。
应该指出的是:在三角函数的某些变化率特别大或特别小的区间,y 的有效位数可能与 x 的有效位数明显不同。在这种情况下应该另行处理。
例 6 已知 y=sinx,x=3.13±0.01 弧度,
求:y。
解 :sin3.13=0.01159, sin(3.13+0.01)=0.00159, sin(3.13-0.01)=0.02159。
以上数据说明在 x 的误差范围内,y 在 10−2 位上已有变化,即 10−2 位上的“1”已经是存疑数字,所以 y 只有一位有效数字。
3.混合运算结果的误差
求混合运算结果的误差有两种方法。一种是用误差分步传递的方法,即多次应用四则运算及乘方、开方、对数、三角函数等初等函数的误差传递公式;另一种是应用误差传递的一般公式。
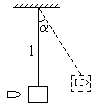
例 7 在用冲击摆测定子弹速度的实验中,木块和子弹的共同速度。
v =
经过测量得到
L=0.250±0.001 米,α=16.3±0.2 度。
解一 用误差分步传递的方法。(1)设 x=cosα,
△x=△α·sinα=0.2×(π/180)×sin16.3°
=0.001。
(2)设 y=1-x,
常数“1”没有误差,所以
△y=△x=0.001。
- E y
= △y =
y
0.001
1 − cos16.3°
= 2.5%,
E = △L = 0.001 = 0.4% 。
L L 0.25
g 是公认值,不必计 g 的误差,因此
1 1
Ev = 2 EL + 2 E y
= 1 (0.4% + 2.5%)
2
= 1.5% 。v =
= 2×9.8×0.25×(1 − cos16.3°)米 / 秒
= 0.4438米 / 秒,
△v = v×E v = 0.45×1.5% 米 / 秒
= 0.007米 / 秒。
则有 v=0.444±0.007 米/秒。解二 用误差传递的一般公式。
△v =
∂v ·△L +
L
∂v α
∂α
1 2g(1 − cosα) 1
2gL
2 L 2
1 − cos α
= ( 1
2×9.8×(1 − cos16.3°) 1
×0.001 +
2 0.25 2
× sin16.3°× 0.2×π )米 / 秒
180
= 0.007米 / 秒,
v =
= 2×9.8×0.25×(1 − cos16.3°)米 / 秒
= 0.4438米 / 秒。
v = 0.444±0.007米 / 秒。
例 8 混合法测量冰的熔解热 L。将一块从冰水混和物中取出的质量为 m 冰、温度为 0℃的冰块,放进温度为 t 初、质量为 m 水的水中,待冰全部熔解后,水温为 t 末。如果忽略量热器筒的吸热及系统与外界的热交换,即把冰、水组成的系统看成一个孤立系统,那么可得热平衡方程式
Q 吸=Q 放。
m 冰L+m 冰c 水t 末=m 水c 水(t 初-t 末),
L = m水 c (t − t ) − c t 。
水 初 末 水 末
冰
经测量得到:m 水=128.0±0.1 克;m 冰=27.0±0.1 克;t 初=(32.5± 0.1)℃;t 末=(13.0±0.1)℃。
解一 用误差分步传递的方法。(1)设 x=t 初-t 末,
=t 初-t 末=32.5℃-13.0℃=19.5℃
△x=△t 初+△t 末=0.1℃+0.1℃=0.2℃。
(2) 设y = m水 ·c
m冰
水·x,
c 水有公认值,不必计它的误差,因此Ey=Em 冰+Em 水+Ex
= 0.1 +
27
0.1
128
+ 0.2
195
= 0.015,
y = m 水 ·c ·x m冰 水
= 128.0 ×19.5 卡 / 克
27.0
=92.44 卡/克。
△y=
·Ey=92.44×0.015 卡/克
=1.4 卡/克。(3)L=y-c 水·t 末,
 =
-c 水·t 末
=
-c 水·t 末
=92.44 卡/克-1×13.0 卡/克
=79.4 卡/克,
△L=△y+△c 水t 末
=1.4 卡/克+0.1 卡/克
=1.5 卡/克。
因此 L=(79±2)卡/克。
解二 用误差传递的一般公式。
L = m 水 ·c ·(t − t ) − c ·t ,
水 初 末 水 末
冰
∂L ∂L ∂L
△L =
∂m水
·△m 水 +
∂m冰
·△m 冰 +
∂t初
·△t 初
+ ∂L
∂t末
·△t 末
= m水 (t − t )·△m
+ m 水 ·c ·( t − t )·△m
初 末 水
冰
m2 冰 水 初 末 冰
+ m水 ·c ·△t + ( m水 ·c + c )·△t
水 初 水 水 末冰 冰
= 1 (32.5 − 13.0)×0.1卡 / 克+ 128 (32.5 − 13.0)×0.1卡 / 克
27 272
+ 128 ×0.1卡/ 克+ (128 + 1) ×0.1卡 / 克
27 27
= 0.072卡 / 克+ 0.35卡 / 克+ 0.48卡 / 克+ 0.58卡 / 克
= 1.5卡 / 克,
L = m 水 ·c ·(t − t ) − c ·t
m冰 水 初 末 水 末
= 128.0 ×1.00×(32.5 − 13.0)卡 / 克− 1.00×13.0卡 / 克
27.0
= 79.4卡 / 克。
L = (79±2)卡 / 克。
比较上面两种方法可以看出,误差分步传递的方法步骤比较多,而且容易发生错误,而用误差传递的一般公式比较简捷。
上述表明由直接测得量求得间接测得量有两种常用方法:有效数字的运算和应用误差传递公式。在实验中,如果两者发生矛盾,那么以误差传递公式的计算结果为准。如果因为各项误差的积累,使间接测得量的绝对误差较大,以使根据有效数字运算法则计算出来的本来应该可靠的位数也产生了误差,那么就将这一位作为存疑数,后面多余的数全部舍弃。例如例 8 中的答案,根据有效数字的运算法应该有三位有效数字即 L=79.4 卡/克。但是用误差传递公式计算,L 的最大误差可能是±1.5 卡/克,也就是说 79.4 中的“9”已经是存疑数,接上面的处理方法最后结果只能是 L=79±2 卡/克。
三 实验的有利条件和最佳条件
(一)实验的有利条件
上面已经讨论了怎样根据直接测量的误差来确定间接测量的误差。这里主要讨论应怎样控制各项直接测量的误差来减小间接测量的误差。
例 1 用单摆测定重力的加速度。
单摆的周期T = 2π
l ,g = 4π2 l 。
g T2
根据乘除法运算的误差传递公式 Eg=El+2ET。
l 和 T 是两个完全独立的量,l 的误差 El 和 T 的误差 ET 可正可负。根据 El 和 ET 的正负,共有四种可能的情况。
|
El |
+ |
+ |
- |
- |
|---|---|---|---|---|
|
2ET |
+ |
- |
+ |
- |
如果在实验中设法使 El 和 2ET 尽量接近,则表中第(2)、(3)两种情况,它们误差将大部分抵消,也就是说最后的结果有 50%的概率 Eg 的误差可以很小。
若要使 El=2ET,也并不困难。例如单摆的摆长 l 约为 1.00 米,用米
尺测量摆长,其绝对误差为 0.002 米。那么,
E = △l = 0.002 = 0.2% 。
l l 1.00
1 1
ET = 2 ·El = 2 ×0.2% = 0.1% 。
单摆摆动时间t 用秒表测量。因为T = t (n为单摆摆动次数),
n
所以 EK=ET=0.001。由于实验者开表和停表时的操作误差一般可控制在
- 秒之内,那么,
△t=t·Et, 0.2=t×0.001,
t=200 秒。
从上述结论 t=200 秒可知,采用摆长为 1 米周期为 2 秒的单摆,只要让单摆摆动 100 次左右,这个实验就可达到预期的目的。
例 2 测量金属圆柱体的密度。
金属圆柱体的密度 ρ = m =
V
4m
πD 2h
。根据误差传递公式
Eρ=Em+Eh+2ED。
m、D 和 h 是三个完全独立的量,m 的误差 Em、D 的误差 ED 和 h 的误差 Eh 可正可负,根据 Em、ED 和 Eh 的正负,共有八种可能的情况。
|
Em 2ED |
+ |
+ |
+ |
+ |
- |
- |
- |
- |
|---|---|---|---|---|---|---|---|---|
|
+ |
+ |
- |
- |
+ |
+ |
- |
- |
|
|
Eh |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
如果在实验中设法使 Em、2ED、Eh 尽量接近,则第(2)、(3)、(4)、(5)、(6)、(7)六种情况的误差将部分抵消,也就是说有 75%的概率 Eρ 的误差可以较小。
如果圆柱体的高 h 为 2.00 厘米,直径 D 为 3.00 厘米。h 和 D 都用游标卡尺测量,其绝对误差为 0.02 厘米。那么
E = △h = 0.02 ×100% = 0.1% ,
h h 20
2E = 2× △D = 2× 0.02 = 0.14% 。
D D 30
在这里,这两项误差相差不多。如果其中一项的误差比另一项大得多(比如说大一个数量级),那么可以增加这个误差较大的量的测量次数或者换用精度更高的仪器来测量这个误差较大的量。
如果圆柱体的质量为 126.0 克,用感量为 0.1 克的天平测量,那么
E = △m =
m m
0.1
126.0
×100% = 0.08% 。
从本实验中,Eh=0.1%,2ED=0.14%,Em=0.08%三个数据看,显然没有必要用精度更高的天平来测量圆柱体的质量。
例 3 测量金属的电阻率。
电路图中被测金属导线的电阻一般远小于伏特表的内阻,因此可以
U
不考虑由实验线路带来的系统误差。根据欧姆定律R = I 和电阻定律
R = ρ L
S
(S = πD2 / 4) 。πD 2U
可得 ρ
4LI 。
 根据误差传递公式
根据误差传递公式
Eρ=EU+EI+EL+2ED。
式中四项误差都是互相独立的,根据它们的正负,共有十六种可能的情况。
|
EU |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
+ |
- |
- |
- |
- |
- |
- |
- |
- |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
EI |
+ |
+ |
+ |
+ |
- |
- |
- |
- |
+ |
+ |
+ |
+ |
- |
- |
- |
- |
|
EL |
+ |
+ |
- |
- |
+ |
+ |
- |
- |
+ |
+ |
- |
- |
+ |
+ |
- |
- |
|
2ED |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
如果设法使 EU、EI、EL 和 2ED 尽量接近,那么第(4)、(6)、(7)、(10)、(11)、(13)六种情况的误差将大部分抵消;第(2)、(3)、(5)、(8)、(9)、(12)、(14)、(15)八种情况的误差将部分抵消。也就是说有 37.5%的概率Eρ的误差很小,有 50%的概率 Eρ的误差较小。
从以上三个例子中看到,在间接测量中,使用适当的测量仪器和测量方法,可以使各直接测得量的误差比较接近,这对减小间接测量的误差是有利的。如果间接测量的误差是由 n 项直接测量的误差构成的,那
么最不利的情况(所有误差项都同号)出现的概率只有
1
2n−1
而间接测
量结果误差很小(误差大部分抵消)或误差较小(误差部分抵消)的概
率有1 −
1
2n− 1
= 1 − 21−n 。n越大,这个概率也越大。
(二)实验的最佳条件
根据实验的有利条件,在实验时应该使各项直接测量的误差尽量接近。但在很多实验中,由于实验条件的限制,这一点是不容易做到的。在这种情况下就要尽量设法减小误差中最大的一项以及与之相关联的其他误差项,来提高实验的精度,这就是实验的最佳条件。
例 1 用惠斯通电桥测量电阻
用直线式电桥测量电阻 Rx 时,两比例臂由直线电阻 R1 和 R2 构成,比
较臂由电阻箱 Rs 构成。当电桥平衡时
R = R1 ·R 。
x s
2
由于直线电阻是均匀的,用 L 表示直线电阻的总长度,l1 和 l2 分别代表两比例臂电阻的长度(如图),则有
Rx =
l1 ·R =
l 2
l1
L − l1
- Rs。
根据误差传递公式
E = △l + △l + △Rs 。
Rx l L − l R
 1
1 s
1
1 s
由于比较臂采用的是电阻箱,精度比较高,因此 △Rs 这项相对
Rs
误差比较小。余下的两项 △l 和 △l 相对来说较大(它们是相关联
l1 L − l1
的),要尽量设法减小它们。
设 y = △l + △l = △l·L ,
l1 L − l1 l1 ( L − l1 )
式中 L 是个恒量,在直线电阻的刻度确定后,误差△l 也是个定值。要使y 有极小值,只要 l1(L-l1)有极大值即可。
l (L − l ) = −l2 + Ll
1 = −(l1 −
L L2
) 2 + 。
2 4
当l = L 时,l (L − l )有极大值为L2 / 4。也就是说,当l = l 时,
1 2 1 1 1 2
y 有极小值,即 Rx 的测量误差最小。例 2 混合法测定金属的比热。
将温度为 t 金、质量为 m 金的金属块放进温度为 t 水、比热容为 c 水、
质量为 m 水的水中,达到热平衡后的温度是 t 末。为了简单起见,略去量热器等的吸热和系统向外的散热,根据热平衡方程
m 金·c 金·(t 金-t 末)=m 水·c 水·(t 末-t 水)。
m水 ·c水 ·( t末 − t水 )
c金 = m ·( t − t ) 。
金 金 末
根据误差传递公式
Ec 金=Em 金+Em 水+E(t 末-t 水)+E(t 金-t 末),
= △m金 + △m水 + △(t 末 − t 水 ) + △(t 金 − t 末 ) 。
m金 m水
t末 − t水
t 金 − t末
为了比较各项误差的大小,这里给出一些具体的数值:m 水=150.0 克,m 金=50.0 克,t 水=20.0℃,t 金=98.0℃,c 水=1.00 卡/(克·度), c 金=0.093 卡/(克·度)(铜块),混合后的温度 t 末=22.3℃。如果用1.0℃分度的温度计,估读误差约为 0.2℃。那么,
△(t 末 − t 水 ) = 0.2 + 0.2 = 0.18,
(t 末 − t水 ) 22.3 − 20.0
△(t 金 − t 末 ) = 0.2 + 0.2 = 0.0053 。
(t 金 − t末 ) 98.0 − 22.3
又设天平的绝对误差△m=0.1 克,
△m金
则
m金
= 0.1 = 0.002, 50
△m水
m水
= 0.1
150
= 0.0007。
△(t 末 − t 水 )
很显然,其中最大的一项误差是
t 末 − t水
。要减小这一项误
差,只有适当地提高 t 末以增大(t 末-t 水)。但如果 t 金不变,提高了 t
末,
△(t 金 − t 末 )
又会使
t 金 − t末
这一项的误差增大,因此必须将这两项误差综合起
来一起考虑。下面讨论 t 末究竟应为多少时,可使得这两项误差最小。设
a
y = x − t +
a
-
x ,
式中 a=△t 末-△t 水=△t 金-△t 末(是一个与 t 末无关的定值),又设x=t 末。这样,问题变成当 x 为何值,y 有极小值。
at − ax + ax − at
y = 金 水
(x − t )(t − x)
水 金
at − at
= 金 水 ,
− [x2 − (t + t )x + t t ]
水 金 水 金
上式分子是一个与 x 无关的定值,只要分母取得极大值,y 就有极小值。分母=-[x2-(t 水+t 金)x+t 水t 金]
t + t t + t
= −[(x − 水 金 ) 2 + t t − ( 水 金 ) 2 ]
2
t + t
水 金 2
t + t
= −(x − 水 金 ) 2 − t t + ( 水 金 )2 。
2
t水 + t 金
水 金 2
当 x =
2 时,分母有极大值,则y 有极小值。
从以上两个例子中可以看到,在实验中要尽量使最大的一项误差(包括与之相关联的其他误差项)取得极小值,这样的实验就处于最佳情况。所以实验的最佳条件是:各项直接测量的误差中的最大项要取极小值。
但是要注意,实验的最佳条件不是所有实验都有的,一般只是在实验中有两项误差相互有关联的时候才能讨论最佳条件。例如例 1 中的
△l △l
△(t 末 − t水 )
△(t金 − t 末 )
l 和 L − l
以及例2中的
t末 − t水
t 金 − t 末
这两项误差都是
相互关联的,其中一项减小,另一项必然增大。而且讨论得出的最佳条
件并非一定都能在实验中实现,比如例2中t = t 水 + t 金 的最佳条件就
末 2
很难在实验中实现,只能在可能条件下尽量朝这个方向靠近。
从有效数字运算的角度来看,也不难理解实验的有利条件和最佳条件。当各项直接测量的误差相差不大的时候,各直接测量值的有效位数一般是相同的,所有测量值的有效数字都可以得到充分的利用。但如果各项直接测量的误差相差得很大(比如说相差两个数量级),那么相对误差比较小的那个直接测量值的最后两位有效数字必须被舍去,成为无效测量。以例 2 为例,如果用物理天平测量 m 水和 m 金,这两个量就分别有 5 位和 4 位有效数字;用 1℃分度的温度计测量温度,那么(t 末-t 水) 这一项最多也只有三位有效数字。根据有效数字的运算法则,计算结果最多只有三位有效数字,也就是说 m 水的后两位和 m 金的后一位有效数字都是无效测量。因此完全可以用托盘天平测量质量,或者改用精度高一些的 0.1℃分度的温度计测量温度,以达到各项直接测量的有效位数基本相同。
四 系统误差
(一)系统误差的特点和来源
测量数据中除了含有偶然误差外,还可能包括系统误差。譬如在重复测量某一物理量时,如果误差的符号基本不变或者按一定的规律变化,这种情况下产生的误差就叫做系统误差。
系统误差的特点是它的出现并不像随机误差那样服从统计规律,而是服从某种确定的函数规律。在相同的条件下测量同一物理量时,系统误差的大小和符号保持不变;当条件改变时,系统误差也按一定的规律变化。
系统误差的来源主要有以下几个方面: 1.实验仪器不够准确
实验的测量仪器不准确会给实验结果带来明显的系统误差,例如米尺缩短,那么测量长度的结果总是偏大;如果秒表走得太慢,那么测量时间的结果总是偏小。为了减小由于测量仪器不准确给实验结果带来的系统误差,应该定期地对测量仪器进行校正。常用的校正方法是与准确度更高的仪器进行比较,如果没有准确度更高的仪器,也可以将多只同类仪器进行比较,一般说来不准确的总是少数。在校正过的测量仪器上
要注明修正值。在使用时可认为
准确值=指示值+修正值。2.实验原理不够完善
实验中所用的公式或原理是近似的,这也会引起一定的系统误差。下面用两个例子说明这个问题。
例 1 用单摆测量重力加速度 g。
单摆的周期公式T = 2π
l 是一个近似公式,只是在摆角θ趋向
g
零时才完全成立。当摆角θ不很小时,单摆周期公式应该是
T = 2π
[1 +
1 2 2 θ + ( 1×3 )2 sin 4 θ + ]
( 2 ) sin 2
2×4 2
略去sin4 θ 及其后面各项,可得
2
T = 2π
(1 + 1 sin2 θ )。
4 2
由此可见,用g = 4π 2 l
T2
计算出的重力加速度是偏小的。这就是
由于使用了近似公式带来的系统误差。
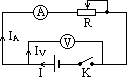
例 2 用安培表和伏特表测定电池的电动势和内阻。
电路如图所示。如果改变 R 的阻值,测得两组(U、I)值,列出方程组
ε = U1 + I1r
①
ε = U 2 + I 2 r
可解得 ε = I1U 2 − I 2 U1 ,
I1 − I2
r = U2 − U1 。
 I1
− I 2
I1
− I 2
从电路图中不难看出,安培表测出的电流值是图中的 IA,而不是流过电池的电流 I。只有当 RV>>R+RA 或者说 I>>IV 时,方程组①才近似成立。准确的方程应该是
ε = U + (I + U 1 )r
0 1 1 0
v ②
ε = U + (I + U2 )r
0 2 2 0
可解得 ε =
(I2 U1 − I1 U 2 )RV ,
0 (U − U ) − (I − I )R
2 1 1 2 V
r = (U 1 − U 2 ) RV 。
0 (U − U ) − (I − I ) R
2 1 1 2 V
比较ε、r 和ε0、r0 可知ε<ε0,r<r0。这就是因计算方程的近似性带来的系统误差。
- 环境的影响
由于环境因素(诸如温度、湿度、气压、照明、电磁场等)对实验的影响,也会导致系统误差。例如用热平衡法来测量冰的熔解热,如果实验时冰块投入容器,实验系统的温度始终低于室温,那么实验系统就会在实验过程中不断地从周围环境吸热,导致最后得到的冰熔解热的数值偏小。
- 实验者本身的因素
测量者在测量时间时按表总有超前或落后,在观察指针时总有偏左或偏右等习惯,都会给测量结果带来系统误差。
(二)怎样发现系统误差
虽然系统误差的出现具有某种确定的规律性,但这种规律性对于不同的实验过程却是不同的。它不像处理偶然误差那样有完整而普遍通用的公式或计算方法,而只能针对每一个具体的实验采取具体的方法。这就要求实验者对研究对象的特殊规律有弃分的了解,要求实验者在学识、实验经验、实验技巧方面有相当的水平。一般地说,处理系统误差比处理偶然误差要困难些,而且容易在不自觉中将它遗漏。研究实验的系统误差的第一步工作就是确定实验中到底有没有系统误差。常用而且比较简单的方法有以下几种:
- 理论分析法
所谓理论分析法就是实验者凭借自己掌握的有关某个实验的物理理论、实验方法和实验经验对该实验所依据的理论公式的近似性、所采用的实验方法的完善性进行仔细、认真的研究和分析,从中找出可能导致系统误差的根源。前面讨论的“用单摆测定重力加速度”、“用安培表和伏特表测定电池的电动势和内阻”等实验,都是用理论分析的方法发现它们具有系统误差的。理论分析法是发现、确定系统误差的最基本的方法。
- 误差观察法
在相同条件下进行重复测量,将测量误差按测量值的顺序排列,观察误差的符号及其数值的变化规律,从中可判断是否存在有规律变化的系统误差。
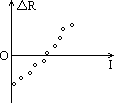
例 1 用伏安法测量小灯泡的电阻。改变小灯泡两端的电压,分别测得当流过小灯泡的电流为 I1=10.0mA,I2=20.0mA,⋯⋯,I10=100.0mA 时小灯泡的电阻 R1=U1/I1,R2=U2/I2,⋯⋯,R10=U10/I10。求出电阻
10
的平均值R = Ri / 10,再求出每次测量的误差△Ri = Ri − R。可发
i=1
现△P 的符号有-----+++++的规律,大小有△R1<△R2<⋯⋯
 <△R9<△R10
的规律。如果作△R-I
图,则如图所示。由此可知实验中存在着有规律变化的系统误差(其中误差的微小起伏是由于偶然误差的影响而引起的。
<△R9<△R10
的规律。如果作△R-I
图,则如图所示。由此可知实验中存在着有规律变化的系统误差(其中误差的微小起伏是由于偶然误差的影响而引起的。
如果改变测量条件(相应地改变了产生系统误差的原因),观察误差的符号及其数值的变化规律,还可以判断是否存在固定的系统误差。例 2 瑞利(Rayleigh)由不同的来源制取了氮气。用化学方法,他分
别从 NO,N2O,NH4NO2,NO2 中制取了氮气,所得氮气的平均密度为 1.2505克/分米 3。接着,他又用各种不同的方法从空气中制取了氮气,平均密度为 1.2572 克/分米 3。
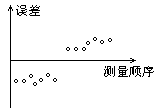 求出测量的平均值,再求出每次测量的误差,可发现由化学方法制取的误差值都是负的,由空气中提取的误差值都是正的(如图所示)。这种情况说明实验中含有随测量条件改变而改变的固定系统误差。
求出测量的平均值,再求出每次测量的误差,可发现由化学方法制取的误差值都是负的,由空气中提取的误差值都是正的(如图所示)。这种情况说明实验中含有随测量条件改变而改变的固定系统误差。
- 误差核算法
误差观察法只适用于系统误差比偶然误差大得较多的情况,否则往往检查不出是否有系统误差存在。误差核算法比误差观察法灵敏。具体方法如下:
设共进行了 N 次重复测量,把各次测量值的误差按测量顺序分成前一半和后一半两个组(若测量次数为奇数时可将中间的一个误差分别参加前后两组计算),然后分别计算前后两个组的误差之和,并求出它们的差
L = ∑
i =1
△i −
∑
i=K +1
△ i 。
如果 L 基本为零,说明测量不存在系统误差或只存在固定的系统误差; 如果 L 显然不为零,说明测量可能存在线性变化的系统误差或随测量条件改变的系统误差。
- 相互比较法
由于固定系统误差本身的特点,无法通过在同一测量条件下进行的多次测量来发现这种系统误差,只能通过改变测量条件,并对两种测量的结果进行比较,才有可能发现。固定系统误差比较检查的方法有多种, 可用不同的实验方法进行对比,可用不同的测量仪器进行对比,也可由不同人员测量进行对比等等。然后以两种不同测量结果之差与它们的偶然误差相比较来判断是否存在系统误差。
设用不同种方法测得同一物理量的结果为
1±s1,
2±s2,⋯⋯, n±sn 。
其中 s 是某种方法测量的标准误差,如果用某种测量方法测量了 n 次,
那么s =
。如果有
|xi − x j|>2
那么可以断定 i 与 j 两种测量方法中至少有一组存在着固定系统误差。在前面例 2 中,瑞利用两种不同的方法制取氮气,由化学方法制取的氮气
的密度和由空气中制取的氮气的密度的平均值之差|ρ1
− ρ|比
要大二十多倍,他便认定两种方法之间存在着系统误差。后来正是对这一系统误差的深入研究,才导致了雷姆塞(Ramsay)发现空气中的惰性气体。
(三)系统误差的估计
实验的系统误差主要来源于实验仪器不够准确、实验原理不够完善以及环境因素的影响。下面分别讨论怎样估计由这些因素引起的系统误差的大小。
1.由实验仪器带来的系统误差
每种测量仪器都有自己的技术指标,其中准确度是最重要的指标之一。测量仪器的最小分度就是它测量的准确度。例如:米尺的准确度是1mm,螺旋测微计的准确度是 0.01mm,物理天平的准确度是 0.02g(游码尺的最小分度),秒表的准确度是 0.1s,一般温度计的准确度是 1℃。通常可将仪器的准确度作为它测量的系统误差。
打点计时器的准确度取决于它使用的交流电的频率。在正常情况下,
交流电频率为50.0±0.5Hz,因此E = △f = 0.01。因为T = 1 ,所以
f f f
ET=Ef=0.01,即△T=T·ET=0.02×0.01s=2×10−4s,因此一般可将打点周期的系统误差定为 0.2ms。
电表的准确程度可由它的级别来定。例如 2.5 级表,指针的指示值
与准确值的差保证不大于电表量程与 0.025 的乘积。如有一个量程为 3V 的 4.0 级电压表,其指示值的最大系统误差为 3.0V×0.04=0.12V。但将0.12V 作为最小分度十分不方便,一般制成 0.10V 作为一分度(准确度)。如取 0.10V 为一分度的电表,它的等级应该为
0.10 = 0.033 = 0.04 。
3.0
注意:没有 3.3 级表,也不能升为 3 级,所以只能降为 4 级表。同样的
理由,2.5 级表通常有 40 分度或 50 分度,1.5 级表通常有 100 分度。在使用电表测量时,一般可将它的最小分度作为测量值的系统误差。
示波器主要用来观察波形。如果用来测量它的准确度较差,通常为
满量程的 10%左右。但如果用示波器来作为比较测量时,准确度可大大提高。例如用利萨如图形来测量未知正弦信号的频率时,其准确度完全由作为标准信号的准确度决定,未知正弦信号频率的有效位数与标准正弦信号频率的有效位数相同。
2.由实验原理带来的系统误差
通常实验方法都具有一定的近似性,也就是说实验原理常存在着不完善性。如果由实验原理造成的系统误差明显小于测量的偶然误差或其他系统误差,那么此实验原理是可行的;反之,则必须对实验原理进行改进或对实验结果进行修正。因此正确估计由于实验原理不完善引起的系统误差的大小是十分必要的。
此类系统误差的大小一般可以进行明确的计算。仍然以上面讨论过的用伏特表和安培表测量电源内阻和电动势的实验为例,如果不考虑伏特表的分流,可解得
r = U 2 − U1 ,
I1 − I2
I U − I U
ε = 1 2 2 1 。
I 1 − I 2
如果考虑伏特表的分流作用,可解得
r = (U 1 − U 2 ) RV ,
0 (U − U ) − (I − I ) R
2 1 1 2 V
ε = (I1U 2 − I 2 U1 )RV 。
0 (U − U ) − (I − I )R
2 1 1 2 V
由于实验原理的不完善(伏特表的分流作用)所引起的内阻和电动势的相对误差分别为
E = r − r0
r0
= − r ,
RV
E = ε − ε0
ε 0
= + r 。
RV
很显然,只有当 RV 远大于 r 时,实验结果才是令人满意的。例如伏特表量程为 0─3V,内阻 RV 为 3.00KΩ,级别为 2.5 级。那么伏特表测量的绝对误差△V=3.00×0.025V=0.075V。如果待测电池的电动势在 1.5V
0.075
左右,那么由于伏特表不准确可能带来的误差是
1.5
= 5%。因此只
有当满足 r
R V
<0.05,即r <0.05×3.0×103 = 1.5×102 Ω的时候,才能
认为实验原理是可行的。如果使用级别更好而内阻不高的伏特表,可能就采用经过修正的 r0、ε0 的计算公式。
3.由环境因素带来的系统误差
估计由环境因素所带来的系统误差的大小是一个比较困难的问题, 一般只能确定一个最大值。仍然以前面说过的用热平衡法测量冰熔解热的实验为例,第一次先用普通室温的水做一次实验,实验过程中实验系统的温度始终低于室温。第二次加适量的热水以提高水的初温,再做一
次实验,这次实验过程中实验系统的温度始终高于室温。两次实验所测得的结果之差,可作为环境因素可能给实验带来的最大的系统误差。
(四)减小和消除系统误差的方法
系统误差的存在会影响测量结果的准确性,特别是对于偶然误差较小的测量影响更明显。一般可以认为:如果系统误差小于偶然误差,那么系统误差尚可容忍;反之,则必须设法减小系统误差。如前所述,处理系统误差没有一般的方法,下面介绍几种减小或消除系统误差的具有一定普遍意义的方法。
- 对测量结果加以修正
对测量仪器用更高一级的标准仪器进行校正,确定一个修正值,最后在测量结果中将修正值除去。这是消除由测量仪器带来的系统误差的最常见、最有效的方法。
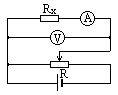
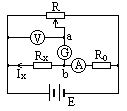
例 1 在如图所示的用伏安法测量电阻 Rx 的实验中,伏特表和安培
表的读数分别为U和I,如果用修正公式R = U − R
计算待测电阻的阻
x I A
值,就可以消除由于实验原理不完善带来的系统误差。
例 2 在用单摆测定重力加速度 g 的实验中,如果用公式
4π2 1 θ
g = (1 + sin2 )
T2 2 2
计算 g 的值,可明显减小由于θ角不是零度带来的系统误差;如果用公式
4π2
1 θ 1 d 2 1μ ρ T2
g = (1 + sin2 + − + 0 +
β2 )
T2 2 2
10 l 2
6M ρ
4π2
来计算 g 的值,便可以进一步消除由于空气阻力、空气浮力、摆线质量、摆球转动惯量等因素带来的系统误差。(式中各字母物理意义如下:l 为摆长,M 为摆球质量,d 为摆球直径,μ为悬线质量,ρ0 为空气密度, ρ为摆球密度,β为空气阻尼系数)。
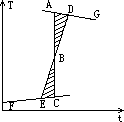
例 3 在用热平衡法测定金属的比热容时,实验系统的温度(T)-时间(t)曲线如图中实线所示。图中 TE 是金属块刚投入量热器时的温度,TD 是量热器升到的最高温度。将预测段直线 FE 向右延长,续测段直线 GD 向左延长,再作一竖直线 AC,尽量使曲边三角形 ADB 和 BEC 的面积相等。折线 FCAG 可看成热交换进行得无限快的理想实验图线。用 TC 代替实验的初温 TE,用 TA 代替实验的末温 TD,这样的修正可减小由于环境因素带来的系统误差。
对实验原理加以改进
在某些准确度要求较高的实验中,必须对实验原理加以改进。以改进伏安法测电阻的实验来说明这个问题。
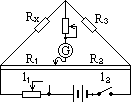
将例 1 中的电路改成右图的形式,便能有效地消除原来由于安培表分压带来的系统误差。实验中可调节 R,使检流计的读数为零,此时 a、b 两点等电位,伏特表和安培表测量的完全是待测电阻 Rx 上的电压和电流。如果要进一步减小由于伏特表和安培表不准确带来的系统误差,可用准确度比伏特表、安培表高的电阻箱来代替它们,进行测量。
在上图电路中去掉安培表,将 R0 换成电阻箱,则待测电阻上的电流
E
I x =
0
- Rx
。再去掉伏特表,将滑动变阻器的左右两部分分别换成
电阻箱 R1 和 R2,这时仍然使检流计读数为零,那么待测电阻上的电压
U = ER1
。根据欧姆定律
x + R
R = Ux
x I
= ER1
+ R
E
/ R + R 。
x 1 2 0 x
可得 R0 + Rx
R x
= R2 + R1 ,
R1
利用分比定律
R 0
R x
= R2 。
R1
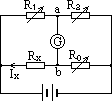
这样就演变成了大家熟悉的惠斯通电桥。由此可见,对实验原理进行分析和改进,可以得到更准确的实验结果。
- 采用适当的测量方法
在测量过程中,根据系统误差的性质,选择适当的测量方法,使测得值中的系统误差得到抵消,可以减小或消除系统误差对测量结果的影
响。
交换抵消法:这种方法是在测量过程中使某些条件相互交换,使产生固定系统误差因素对测量结果起相反的作用,从而抵消这种不变的系统误差。
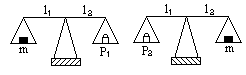
例 4 用天平测量物体的质量 m。设天平左、右臂为 l1 和 l2,分别两次将 m 放在左、右盘中测得的质量为 P1 和 P2,如图。因为
l1m=l2P1,l1P2=l2m,
两式相除,可得
m = P1 P2 。
用这种交换测量的方法可消除由于天平不等臂带来的系统误差。
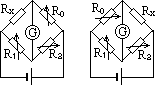
例 5 用惠斯通电桥测一未知电阻 Rx。当电桥平衡后有
Rx =
R1 ·R
R 2
为了消除 R1、R2 阻值不准确带来的系统误差,可交换 Rx 和 R0 的位置,使电桥再次平衡后有
R = R2 R' ,
两式相乘,可得
x 0
1
Rx = 。
代换法:在测量装置上对被测量物进行测量后,在不改变测量条件的情况下,用一个可变标准量代替被测量物,调节可变标准量,使测量装置恢复原状。此时可变标准量的数值就是被测量物的数值。这种方法可消除绝大多数系统误差。
例 6 用天平称物体质量。先将待测物放在右盘中,然后在左盘中加细沙,直至天平平衡;然后取下待测物,在右盘中放标准砝码,直至天平恢复平衡。此时天平右盘中砝码的总质量就是待测物的质量。
例 7 用伏安法测电阻。接通电路后,记下伏特表和安培表指针的确切位置。然后用一个标准电阻箱替换待测电阻,将电阻箱阻值置于最大值后接通电路。调节电阻箱的阻值,直至伏特表、安培表的指针回到原来的位置上。此时电阻箱的阻值就是待测电阻的阻值。
- 异号补偿法:在测量中控制某些条件,使测量结果中的两部分系统误差符号相反,大部分都能抵消。
例 8 在用热平衡法测定冰的熔解热时,实验系统的温度(T)-时间(t)曲线如图中实线所示。图中 T1 是冰块刚投入量热器时的温度,T2 是量
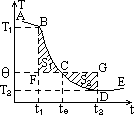 热器能降到的最低温度,θ是室温。在
t1 到
tθ这段时间里,量热器温度高于室温,量热器向周围环境释放的热量可用曲边三角形
BFC 的面积 S1 来表示,从 tθ到 t2
这段时间里,量热器温度低于室温,量热器从周围环境中吸收的热量可用曲边三角形
CGD 的面积 S2
来表示。如果在实验中适当地控制实验条件(如水的初温、水和冰块的质量等因素),使图中
S1 和 S2 两块面积大致相等,便可使量热器在 t1 到 tθ时间中的放热和
tθ到t2 时间中的吸热大致抵消。从而减小因外界因素带来的系统误差。
热器能降到的最低温度,θ是室温。在
t1 到
tθ这段时间里,量热器温度高于室温,量热器向周围环境释放的热量可用曲边三角形
BFC 的面积 S1 来表示,从 tθ到 t2
这段时间里,量热器温度低于室温,量热器从周围环境中吸收的热量可用曲边三角形
CGD 的面积 S2
来表示。如果在实验中适当地控制实验条件(如水的初温、水和冰块的质量等因素),使图中
S1 和 S2 两块面积大致相等,便可使量热器在 t1 到 tθ时间中的放热和
tθ到t2 时间中的吸热大致抵消。从而减小因外界因素带来的系统误差。
对称观察法:当实验系统的变化显现某种对称性时,可安排互相对称的两次测量,以此来减小或消除系统误差。
例 9 在气体定律的实验中,先将注射器活塞向上拉一下,让它回到平衡位置 x1;再将活塞向下压一下,让它回到平衡位置 x2,最后取
x = x1 + x2 作为测量结果,这样可以消除由于摩擦力带来的系统误差。
2
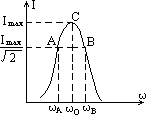
例 10 测定 LRC 串联电路谐振频率的实验。谐振曲线如图所示,函数关系是
U
I = ,
式中ω为信号频率。由图可见,如果由电流最大值为判断谐振频率,由于 C 点附近曲线斜率很小,会使测量产生很大的误差。为此可以取 I 为I max / 时,曲线斜率最大的A点和B点。并可读出相应的频率ω A 和 ωB。根据
U
I = ,
1
当 Iω0 − Cω
= 0时,I = U ;
max R
当 IωB
1
-
Cω
1
= R时,IB = ;
当
以上两式相加,
IωA − Cω
= R时,IA = ;
LC(ω
A + ω B
) − ω A + ω B
ω A ω B
= 2RC,
当 LC(ω
A + ω B
) = ω A + ω B 时,
ω A ω B
1 = ω
LC
A ·ω B,
因此 ω 0 = ω A ω B 。
由于 A、B 两点曲线斜率比 C 点大得多,在仪器灵敏相同的情况下, 可使ωA 和ωB 测得更准确,从而减小误差。
(五)间接测量的系统误差
设间接测量中的偶然误差可忽略不计,那么间接测量结果的误差就可以由各直接测量的系统误差来确定。下面分固定系统误差和不定系统误差两种情况来讨论。
- 固定系统误差的传递
固定系统误差的大小和正负都是可以确定的,因此可以用以下公式
∂f
算出间接测量的误差θ y = ∂x
θ + ∂f
x1 ∂x
∂f
- θx 2 + + ∂x
θm ,式中
θ 、θ 、 、θ
∂f ∂f
为各直接测的系统误差, , , ,
x1 x2 xm
∂f
∂x1 ∂x2
∂xm
为传递系数。传递系数的大小和正负由间接测量的函数形式
y=f(x1、x2、⋯⋯、xn)确定。由于各项误差传递系数和各项直接测量的误差都是可正可负的,所以各项直接测量的误差对最后测量结果的影响可能是增大了误差,也可能因相互抵消而减小了误差。
用以上误差传递公式可求出各种函数形式的误差传递结果。例如: (1)y=x1+x2
绝对误差为 θy=θx1+θx2,
1
相对误差为 Ey = y (θx1 + θx 2 ) 。
(2)y=x1·x2
绝对误差为 θy=θx1·x2+θx2·x1,
相对误差为
E = θx1 + θx2
y x x
= E x1
-
E x2。
1 2
(3) y = x1
x 2
绝对误差为
θ = θx1 − x1·θx2 ,
y 2
2 2
相对误差为
E = θx1 − θx2
y x x
= Ex1
- E x2 。
1 2
不定系统误差的传递
由于不定系统误差的产生具有一定的随机性,其确切大小和正负都不知道,因此它和偶然误差有某些相似之处。在进行间接测量时,各个直接测量的不定系统误差取正或取负的机会是均等的,有一部分系统误差可能互相抵消。但因为在误差传递的过程中难以确定能互相抵消的误差的多少,因此只能考虑最不利的情况,即所有误差都相加的情况,可得误差公式
θy =
∂f
∂x ·θx1 +
∂f
∂x ·θx2 + +
∂f
∂x ·θxm 。
上式的形式与偶然误差的误差传递一般公式相同,所不同的是误差的性质。偶然误差传递的一般公式中的△x 表示的是各直接测量中的偶然误差;而上式中的θ表示的是各直接测量中的不定系统误差,它们的含义是不同的。例如用电表进行单次测量时,△x 可定为最小分度的 1/10 或 1/5,而θ则应定为电表的等级与电表满量程的乘积。
