94 研究弹簧的弹性势能与哪些因素有关
弹性势能无法直接测量。本实验的两个方法都是让弹性势能转换为物体的动能,然后通过测量物体的动能来比较原来弹性势能的大小。
方法一
器材 气垫导轨,气源等。
操作
-
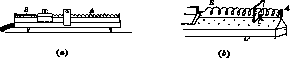
把两弹簧的一端与滑块连接,另一端固定在导轨的两端。在滑块上装上一个挡光框,待滑块静止后,将光电门放在平衡处(如图 a),使挡光框正好挡住光线。
-
毫秒计的功能开关置 s2 档,时间选择开关用最小的一档。使滑块偏离平衡位置 10.0cm(从导轨的标尺上可看出),由静止释放。滑块经过光电门时,毫秒计记下挡光时间 t,如果挡光框两前沿之间的距离为 d, 则滑块经过光电门时的速度 v=d/t。如果滑块的质量是 m,则滑块的
动能Ek
= 1 mv2
2
= md2 / 2t 2。
-
改变滑块偏离平衡位置的距离 x(例如 15.0cm,20.0cm⋯⋯), 重复操作(2),得到若干组(x,Ek)值。
-
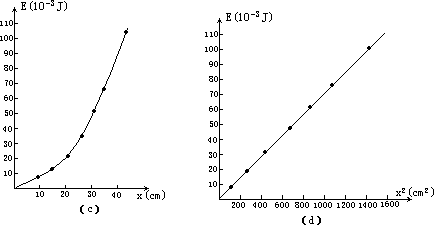
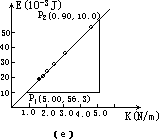
作 Ek-x 图,得到一条曲线。与基础篇第 50、51 页中各种函数的图线比较,比较像 y=Kx2 图线,因此再试作 Ek-x2 图线,得到一条过原点的直线,说明弹簧的弹性势能与它的形变的平方成正比。(也可以用线性回归法证明 Ek 和 x2 成正比,具体方法参阅基础篇第 57 页的有关内容。)
-
从胡克定律可以推得,同一根弹簧,当它的匝数变成原来的 1/n
时,它的倔强系数就变成原来的 n 倍。滑块静止时,用一金属片在 C 点处卡住弹簧(图 b),保持金属片与导轨相对静止,AC 段弹簧不再起作用。如果 BC 段匝数是整个弹簧匝数的 1/n,便可认为 BC 段弹簧的倔强系数是原来弹簧倔强系数的 n 倍。保持滑块每次偏离平衡位置的距离 x 不变,使 BC 段弹簧匝数依次为原来匝数的 9/10,8/10,7/10⋯⋯重复操作(2),得到若干组(K,Kk)值。
-
作 Ek-K 图,得到一条过原点的直线,说明形变相同时,弹簧的弹性势能与它的倔强系数成正比。(也可以用线性回归法证明 Ek 和 K 成正比,具体方法参阅基础篇第 57 页的有关内容。)
-
应用多变量复合的方法(参阅实验 63 的按语),得出弹簧的弹性势能 EP∝Kx2,即 Ep=aKx2 的结论。如果操作(5)中滑块偏离平衡位置的距离是 x,操作(6)中 Ek-K 图线的斜率是 k,则可定出比例系数 a=k/x2。
注意
-
操作(5)中滑块的两端的弹簧的匝数要同时减少,而且变化的比例要完全一样。
-
弹簧的匝数变化之后,要使光电门仍然处在滑块的平衡位置处。
说明
本实验中测量的所谓弹簧势能,都是相对滑块在平衡位置时弹簧的弹性势能为零而言的。下面说明这样处理的原由。
左右两根弹簧分别用 A、B 表示,设滑块处于平衡位置时,两根弹簧的伸长分别为△xA 和△xB,有
KA△xA=KB△xB ①
滑块偏离平衡位置 x 后,(设 A 伸长,B 缩短)系统的机械能是
E = 1 K
1 2
A (∆x A
+ x) 2 + 1 K
2
B (Ax B
− x) 2 ,
滑块释放后运动到平衡位置时,系统的机械能是
E = 1 K Ax 2 + 1 K ∆x2 + 1 mv2
2 2 A A 2 B B 2
因为 E1=E2,
1
所以 2 K
A ( ∆xA
+ x) 2 + 1 K
2
B (∆xB
− x) 2
= 1 K 2
2 A A
+ 1 K 2
2 B B
+ 1 mv2 ,
2
K ∆x x + 1 K x − K ∆x x + 1 K x2 = 1 mv2 ②
A A 2 A B B 2 B 2
将①式代入②式
1 mv 2 = 1 (K + K )x2 ,
设 KA+KB=K
2 2 A B
E = 1 Kx2 。k 2
可见滑块的动能(等于弹簧的势能)与偏离平衡位置的路程 x 的平方及弹簧的倔强系数 K 成正比。
实例 某次实验中得到的实验数据:(m=0.21kg)
|
x(m) |
0.100 |
0.150 |
0.200 |
0.250 |
0.300 |
0.350 |
0.400 |
|---|---|---|---|---|---|---|---|
|
t(ms) |
37.8 |
25.2 |
18.9 |
15.1 |
12.6 |
10.8 |
9.4 |
|
v(m/s) |
0.265 |
0.397 |
0.529 |
0.662 |
0.794 |
0.926 |
1.06 |
|
Ek(10-3J) |
7.40 |
16.5 |
29.4 |
46.0 |
66.2 |
90.0 |
118 |
作 E-x 图,得到一条曲线(图 c),与基础篇第 50、51 页中各种图线比较,估计是 E=Kx2 的关系。再作 E-x2 图,得到一条过原点的直线(图d),说明弹簧的弹性势能与它的形变的平方成正比。
|
X2(m2) |
0.0100 |
0.0225 |
0.0400 |
0.0625 |
0.0900 |
0.123 |
0.160 |
|---|---|---|---|---|---|---|---|
|
E(10-3J) |
7.40 |
16.5 |
29.4 |
46.0 |
66.2 |
90.0 |
118 |
|
K(N/m) |
1.40 |
1.56 |
1.75 |
2.00 |
2.33 |
2.80 |
3.50 |
4.67 |
|---|---|---|---|---|---|---|---|---|
|
t(ms) |
25.8 |
24.5 |
23.1 |
21.6 |
20.0 |
18.3 |
16.3 |
14.1 |
|
v(m/s) |
0.388 |
0.408 |
0.433 |
0.463 |
0.500 |
0.546 |
0.613 |
0.709 |
|
E(10-3J) |
15.8 |
17.5 |
19.4 |
22.5 |
26.3 |
31.3 |
39.5 |
52.8 |
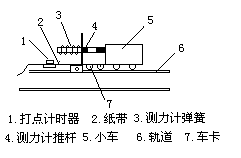
用改变弹簧匝数的方法改变弹簧的倔强系数,得到如下实验数据: x=0.150m,m=0.210kg 作出 Ek-K 图,得到一条过原点的直线(图 e),说明形变相同时,弹簧的弹性势能与它的倔强系数成正比。在图线上取两点 p1(0.90,10.0)和 p2(5.00,56.3)求出图线的斜率
k = y 2 − y1
y 2 − x1
(56.3 − 10.0)×10−3
= 5.00 − 0.90
= 11.3×10−3 。
用多变量复合的方法可得到弹簧的弹性势能 Ep=Akx2(a 为比例系数)
的结论。比例系数a = k / x2 = 11.3×10-3 / 0.1502 = 0.501。此值十分接近
-
,即E
-
p
= 1 Kx 2。
2
方法二
器材 高中运动学,动力学组合教具等。
操作
如图所示,装配好实验仪器。调节轨道的角度,使小车拖着纸带在轨道上作匀速运动。
-
用小车将测力计推杆压入,使测力计变形为三个环,然后用车卡卡住小车。
-
释放小车,打点计时器在纸带上打出一列点子,从纸带上求出小车脱离推杆后作匀速运动的速度 v。
-
改变测力计弹簧的形变 x(例如四个环,五个环,⋯⋯),重复操作(3),得到一系列(x,v)值。
-
以横轴代表测力计弹簧的形变 x,纵轴代表小车获得的速度 v, 作 v-x 图,得到一条过原点的直线,说明小车的速度与弹簧的形变成正比。(也可以用线性回归法来证明 v 与 x 成正比,具体方法参阅基础篇第 57 页的有关内容。)
(6)因为弹性势能等于小车的动能,而小车的动能E = 1 mv2 ,由此
k 2
可知弹簧的势能和它的形变x的平方成正比。
