有固定转动轴的物体的平衡 45
本实验介绍了两种验证具有固定转动轴物体平衡条件的方法,还在方法一的分析部分介绍了验证性实验的误差处理方法。
方法一
目的 验证有固定转轴物体平衡的条件。
器材 力矩盘,测力计,铁架台,横杆,细绳,钩码等。
操作
-
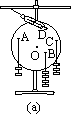
将力矩盘的金属轴 O 水平地固定在铁架台上,使力矩盘面保持竖直。在盘的上方固定一根水平横杆。
-
在盘面上覆一张白纸后再在适当的位置A、B、C、D,按上四个图钉,其中A、B、C 三个位置上挂钩码,另一个D 位置上拉测力计(图a)。
-
调整测力计在横杆上的悬挂点,使各串钩码拉力的作用线离 O 点都不要太近。系统初步平衡后,再轻轻地敲几下力矩盘,以减小摩擦力的作用。
-
在白纸上记下转动轴O 点的位置,并画出 FA、FB、FC 和FD
四个力的作用线。
根据转轴和四个力的作用线的位置,测出四个力的力臂lA、lB、lC 和lD。
- 根据各力的大小和力臂的长短,计算出各力的力矩 Fl。将使转盘逆时针转动的力矩计为正,使转盘顺时针转动的力矩计为负,如果在实验误差范围内各力矩的代数和为零,即验证了有固定转轴物体平衡的条件。
注意
-
实验前要检查力矩盘是否在任何位置都能平衡,如果达不到这个要求表明盘的重心偏离转轴,要加配重进行校正。
-
由于测力计的测量精度比钩码的精度低,因此在实验中应尽量使测力计的读数大一些。以减小其相对误差。
-
系统平衡时,各力的力臂都不能太小,否则将增大测量力臂的相对误差。(4)实验时,应该用手扶持测力计,以减小因测力计自重下垂而带来的误差。分析
下面解释“在实验误差范围内,各力矩的代数和为零”的含义。
系统平衡后可进一步考虑各个力的误差范围。在铁架台上固定一根小指针,白纸上指针的延长线处画一标志(图 b)。在 A 串钩码上逐渐增加小砝码,直到用眼睛
 能判断出力矩盘底部的指针与标志开始错开为止,增加上去的砝码所受的重力就是ΔFA。用同样的方法可确定ΔFB、ΔFC。取下测力计与横杆连接点,沿原方向逐步向外拉测力计,直到用眼睛发现指针与标志错开,读出测力计的读数
F’D ,Δ FD=F’D? FD。
能判断出力矩盘底部的指针与标志开始错开为止,增加上去的砝码所受的重力就是ΔFA。用同样的方法可确定ΔFB、ΔFC。取下测力计与横杆连接点,沿原方向逐步向外拉测力计,直到用眼睛发现指针与标志错开,读出测力计的读数
F’D ,Δ FD=F’D? FD。
不考虑测量力臂的误差,则
∆M =
lA ·∆FA
-
l B·∆FB
-
l C·∆FC
-
l D ·∆FD 。
如果ΣM? ΔM<0<ΣM+ΔM,
则可认为在实验误差范围内,各力矩的代数和为零。
方法二
目的 同方法一。
器材 高中静力学演示教具(J2143 型)。
操作
-
按仪器说明书组装好实验用的框架。在横架上安装一个测力计,两侧立柱上安装三个定滑轮。滑杆上安装轴承座,并在轴承上装上力矩盘,使盘能灵活地转动。
-
在四根拉线的一端捡上开口销,分别插入力矩盘上四个孔 a、b、c、d 中。其中三根线分别跨过定滑轮悬挂槽码,另一根拴到测力计拉钩上。
-
调节滑轮和测力计的位置,使测力计拉线为竖直方向,另外三根拉线都分别和某一个圆环相切(如图)。
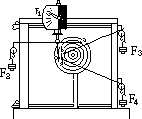
- 整个系统平衡时,记下测力计读数 F1,三串槽码所受的重力 F2,F3,F4。盘上相邻两环间的距离为已知,可依次确定四个力的力臂分别为l1、l2、l3 和 l4。
使力矩盘逆时针转动的力矩计为正,使力矩盘顺时针转动的力矩计为负,如果在实验误差范围内各力矩的代数和ΣM=F1l1+F2l2+F3l3+F4l4 为零,即验证了有固定转动
轴物体平衡的条件。
方法三
器材 自制力矩平衡仪,铁架台,测力计,细绳,钩码等。力矩平衡仪的制作方法
用轻质木杆等制成(图a),在杆上画红白相间等长的刻度。两个量角器用硬纸片自制,左边一个量角器的圆心固定在轴上,右边一个量角器可沿着横杆移动。
操作
-
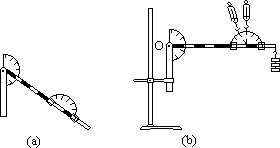 在力矩平衡仪上加钩码与测力计(图b)。
在力矩平衡仪上加钩码与测力计(图b)。 -
固定木杆 OA 的位置,改变测力计的角度,根据钩码的重力和木杆的长度,
可算出使木杆顺时针转动的力矩;又根据测力计的读数、OA 的长度及测力计作用力的方向与木杆的夹角,可算出使木杆逆时针旋转的力矩。看这两个力矩的大小是否
始终基本相等。
-
同时改变木杆的方向和测力计的方向,根据钩码的重力、木杆的长度及木杆的方向,可算出使木杆顺时针旋转的力矩的大小;根据测力计的读数、OA
的长度及测力计作用力的方向和木杆的夹角,可算出使木杆逆时针转动的力矩的大小。看这两个力矩的大小是否始终基本相等。
-
移动右边量角器在木杆上的位置(即改变OA
的长度),重复以上实验。(5)将钩码和测力计换成图(c)所示的位置,重复(1)、(2)、(3)、(4)的操作步
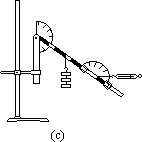 骤。
骤。
注意
-
实验过程中,测力计的作用力必须始终保持在竖直平面内。
-
因实验中忽略木杆的重力,所以除了选择轻质木料制杆外,钩码的数量应适当地多一些,而且钩码的悬挂点不宜太靠近转轴。
