验证动量定理 69
本实验用五种方法验证动量定理。方法一、二、三是简单的定性实验,从三个不同的角度说明了动量定理,方法四、五是较严格的定量实验,用图线法证实△v 与△t 成正比,并且比例系数就是 F/m。
方法一
目的 说明当作用力 F 不变时,作用时间越短,物体动量的改变量越小。
器材 墨水瓶,纸带,木棍,图钉等。
操作
-
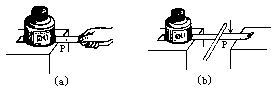
将纸带压在墨水瓶底下(另一端露出部分不要太长)(图 a), 用手慢慢地拉动纸带,可以看到墨水瓶随纸一起移动。说明纸带的摩擦力对墨水瓶产生了较大的冲量。
-
让墨水瓶与纸带恢复原样,将纸带的另一端用图钉钉在另一张桌子上,然后用木棍快速由纸带 P 点处往下打,可以看到纸带由瓶底抽出,而墨水瓶平稳地留在原处(图 b)。说明在摩擦力不变的条件下,由于时间很短,纸带对墨水瓶的冲量很小。
注意 墨水瓶的质量大一些好,因此应选用装满墨水的墨水瓶。
方法二
目的 说明当物体冲量的变化量一定时,力作用的时间越长,作用力越小。
器材 500g 砝码,细线,橡筋,支承架等。
操作
-
一根细线一端固定在支承架上,另一端悬挂一个 500g 重的砝码。
-
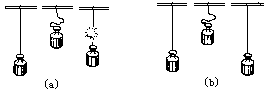
将砝码抬高适当的高度后释放。由于细线从松弛到张紧的变化过程历时很短,因此细线因受到很大冲力而被拉断(图 a)。
-
用另一根细线,上端通过一根橡筋与支承架相连,下端仍然悬挂同一个砝码。
-
将砝码抬高相同的高度后释放。由于橡筋的缓冲作用,力作用的时间增长,细线没有被拉断,说明这时作用力较小(图 b)。
注意
-
细线的强度,砝码的质量大小、抬高的高度应经过反复试验后确定。
-
支承架要牢固。
方法三
目的 说明如果作用时间较长,即使是较小的力也能产生较大的冲量;如果作用时间很短,即使是较大的力产生的冲量仍然不大。
器材 槽码钩 2 个,滑轮,细绳,槽码,坏试管,铁架台等。
操作
将滑轮固定在铁架台上,跨过滑轮的细绳两端各挂一叠质量相同的槽码(如图)

-
将坏试管轻轻地放在任一侧的槽码上,可看到系统慢慢地运动起来。这时虽然试管对槽码的作用力不大(约等于试管的重力),但由于作用时间较长,仍能使系统的动量发生明显的变化。
-
取下试管,使两侧槽码恢复原样。手持试管后端用其前端迅速打击一下任一侧的槽码。可看到试管前端被击碎,而系统几乎不动。这时虽然试管对槽码的作用力很大(从试管被击碎可证实),但因作用时间很短,系统的动量未能发生明显的变化。
注意 槽码的质量大小应与试管的重力相配合,太大了,操作(2) 不易运动;太小了,操作(3)试管不易破碎。
方法四
器材 带滑轮的长木板,打点计时器,天平,砝码,槽码,槽码钩, 纸带,细绳等。
操作
-
同实验 68 操作(1)。
-
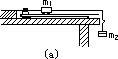
跨过定滑轮的细绳一端拉着质量为 m1 的小车,另一端悬挂一叠质量为 m2
的槽码(如图 a)。
-
接通打点计时器电源后释放小车,槽码拉着小车作加速运动, 在纸带上打下一系列点子(如实验 68 图 c)。
-
同实验 68 操作(4)。
-
研究当系统的质量 M=m1+m2 和使系统动量发生变化的作用力F=m2g 不变时,系统速度的增量△v 和力 F 作用的时间△t 之间的关系。
以 A 点为起始点,△ v1=vB-vA,△v2=vC-vA,△v3=vD-vA,△v4=vE-vA,
△v5=vF-vA,△v6=vG-vA;△t1=3T,△t2=6T,△t3=9T,△t4=12T,△ t5=15T,△t6=18T。以横轴代表△t,纵轴代表△v,根据上述数据作出△ v-△t,图,可以得到一根过原点的直线,说明当 M 和 F 不变时,△v∝
△t。
- 用图解法得到△v-△t 图线的斜率 k。在误差范围内,k 与 F/M
相等,即验证了动量定理。
注意
-
同实验 68 注意(2)。
-
实验中△v∝△t
的关系以及图线的斜率,也可以用线性回归法来得到,具体方法见基础篇第 57 页的有关内容。
-
如果只将小车作为研究对象,即认为 M=m1,F=m2g,实验将产生较大的误差。只有在 m1 比 m2 大得多时,才可这样近似。
实例 实验中用的小车的质量 m1=0.290kg,槽码钩与槽码的总质量m2=0.100kg,实验后得到一条如实验 68 图(c)所示的纸带,测量后得到s1、5=2.05cm,s4、8=3.02cm,s7、11=4.41cm,s10、14=5.58cm,s14、16=3.38cm, s17、19=4.02cm,s20、22=4.54cm。
V = S / (4T) = 0.0205 m / s = 0.256m / s,
A 1、5 4.00 × 0.0200
VB = S
1、5
/ (4T) =
0.0320
4.00 × 0.0200
0.0441
m / s = 0.400m / s,
VC = S7、11 / (4T) = 4.00 × 0.0200 m / s = 0.551m / s,
0.0588
VD = S10、14 / (4T) = 4.00 × 0.0200 m / s = 0.698m / s,
0.0320
VE = S14、16 / (4T) = 2.00 × 0.0200 m / s = 0.844m / s,
0.0320
VF = S17、19 / (4T) = 2.00 × 0.0200 m / s = 1.01m / s,
VG = S
20、22
/ (4T) =
0.0320
2.00 × 0.0200
m / s = 1.14m / s,
△v1=VB-VA=(0.400-0.256)m/s=0.144m/s,
△v2=VC-VA=(0.551-0.256)m/s=0.259m/s,
△v3=VD-VA=(0.698-0.256)m/s=0.442m/s,
△v4=VE-VA=(0.844-0.256)m/s=0.588m/s,
△v5=VF-VA=(1.01-0.256)m/s=0.751m/s,
△v6=VG-VA=(1.14-0.256)m/s=0.88m/s。
△t1=3T=0.060S,△t2=6T=0.120S,
△t3=9T=0.180S,△t4=12T=0.240S,
△t5=15T=0.300S,△t6=18T=0.360S。
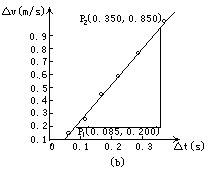
以横轴代表△t,纵轴代表△v,作出△v-△t 图(图 b)。用图解
法求出图线的斜率k=(y2-y1)/(x2−x1)
=(0.850-0.200)/(0.350-0.085)=2.45。F/M=(0.10×9.8)/(0.29+0.10)=2.5,
与 k 值基本相同。
也可以用线性回归法处理实验数据。相关系数 r=0.998>0.917,说明
△v 和△t 成线性关系;截距 b=-0.019m/s,截距的误差△b=0.019m/s,
△b≥b,可以认为图线过原点,因此△v 和△t 成正比关系。斜率 k=2.52, 也与 F/M 值基本相同。
方法五
器材 气垫导轨,数字毫秒计,气源,天平,砝码等。
操作
-
按照实验 63 方法四操作(1),(2)的步骤将气垫导轨调节成水平状态。
-
将滑块通过细线或尼龙带与砝码盘相连,在无滑轮一端装上定位杆,如图(a)。在砝码盘中放上适量的砝码。
在滑块上装上最窄的一种挡光框,并记下挡光框中心的位置。记时功能开关拨到 s2 档,时间选择开关拨至最小档。将滑块紧靠定位杆后释放,当滑块通过光电门 G1、G2 时,毫秒计便记下两个挡光时间 t1 和t2。如果所用挡光框两前沿之间的距离是 d,则滑块通过 G1、G2 时
d
的速度分别是v1 = d / t 1和v2d / t 2,速度的增量是△v = v2-v1 =
2
-
d 。
t1
-
将滑块上的挡光框换成挡光条,使挡光条的前沿对准原来挡光框中心的位置。如果挡光条与挡光框质量不等,应该用橡皮泥等物体加以补偿。适当地增大毫秒计的计时单位。使它能记下滑块从 G1 滑行到 G2 的时间。仍能将滑块紧靠定位杆后释放,测出它从 G1 运动到 G2 的时间△ t。这样便得到一组(△t,△v)值。
-
改变两个光电门的位置及距离,重复操作(3)、(4),可得到另一组(△t,△v)值。共重复 7−9 次。
-
用天平称出滑块(包括挡光条或挡光框)的质量 M 和砝码盘(包括其中的砝码)的质量 m。
-
以横轴代表△t,纵轴代表△v,作出△v-△t 图线,得到一条过原点的直线,说明当系统质量(M+m)和作用力 mg 不变时,△v 和△t 成正比。
-
用图解法求出图线的斜率 k,如果 k 与 mg/(M+m)基本相同的话,可以认为动量定理得到验证。
实例 某次实验数据如下:
滑块质量 M=0.223kg,砝码盘(包括其中砝码)质量 m=0.010kg,挡光框宽度 d=0.0100m。
|
t1(ms) |
t2(ms) |
v1(m/s) |
v2(m/s) |
△ v(m/s) |
△ t(s) |
|---|---|---|---|---|---|
|
24.8 |
11.2 |
0.403 |
0.893 |
0.490 |
1.10 |
|
24.5 |
12.2 |
0.408 |
0.820 |
0.412 |
0.981 |
|
24.9 |
12.8 |
0.402 |
0.781 |
0.379 |
0.919 |
|
24.7 |
14.1 |
0.405 |
0.709 |
0.304 |
0.734 |
|
25.0 |
16.3 |
0.400 |
0.613 |
0.213 |
0.507 |
|
24.6 |
17.4 |
0.407 |
0.575 |
0.168 |
0.392 |
|
24.8 |
18.3 |
0.403 |
0.546 |
0.143 |
0.336 |
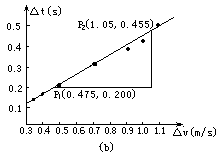
以横轴代表△t,纵轴代表△v,作出△v-△t 图线(图 b)。用图解法求出直线的斜率
k = (y2 - y1 ) / (x2 - x1 )
= 0.455 - 0.200 m / s2
1.05 - 0.48
= 0.477m / s2 ,
mg / (M + m) = 0.010 × 9.8 m / s2 = 0.420m / s2 ,
0.223 + 0.010
与 k 值基本相同。
也可以用线性回归法处理实验数据。相关系数 r=0.996>0.874,说明
△v 和△t 成线性关系;截距 b=-0.006m/s,截距的误差△b=0.013m/s,
△b>b ,可以认为图线过原点,因此△v 和△t 成正比关系。斜率k=0.432m/s2,也与 mg/(M+m)值非常接近。
