多个共点力的合成
本实验的分析部分介绍了一种验证性实验中处理数据的方法。
目的 验证多个共点力平衡的条件。
器材 滑轮,木板,刻度尺,量角器,细绳,钩码,砝码等。
操作
-
在木板上覆盖一层薄纸,然后将四个滑轮的轴固定在木板上。把四根细绳的一端结在一起,另一端跨过滑轮,各挂一串钩码(图a)。
-
系统平衡后,在白纸上记下四根细绳的交点 O 的位置以及四根细绳的方
向。
- 根据钩码的多少和细绳的方向,在白纸上作出四个力的图示 OA、OB、OC 和
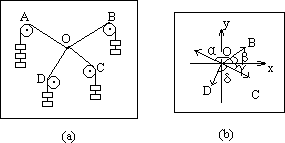 OD(图b).
OD(图b).
-
以O 点为原点,作出水平方向 x 轴和竖直方向 y 轴。用量角器测出各个力与x 轴正方向所成的角度α、β、γ和δ。
-
计算ΣFx=OAcosα+OBcosβ+OCcosγ+ODcosδ。和ΣFy=OAsinα+OBsinβ
+OCsinγ+ODsinδ。如果ΣFx 和ΣFy 在误差范围内等于零,即验证了多个共点力平衡的条件。
- 改变钩码数目,可以验证其他情况。
分析 现在解释“ΣFx 和ΣFy 在误差范围内等于零”的含义。
系统平衡并记下结点O 的位置之后,可以进一步考察四个力的误差范围。在 A 串钩码上逐步增加小砝码,直至用眼睛能判断结点的位置发生了变化为止,增加上去的砝码的重力即为ΔFA。用同样的方法可确定ΔFB,ΔFC,ΔFD。
ΔFx=|ΔFAcosα|+|ΔFBcosβ|+|ΔFCcosγ|+|ΔFDcosδ|, ΔFy=|ΔFAsinα|+|ΔFBsinβ|+|ΔFCsinγ|+|ΔFDsinδ| 如果ΣFx? ΔFx<0<ΣFx+ΔFx,
ΣFy? ΔFy<0<ΣFy+ΔFy,
则可认为ΣFx 和ΣFy 在误差范围内等于零。
